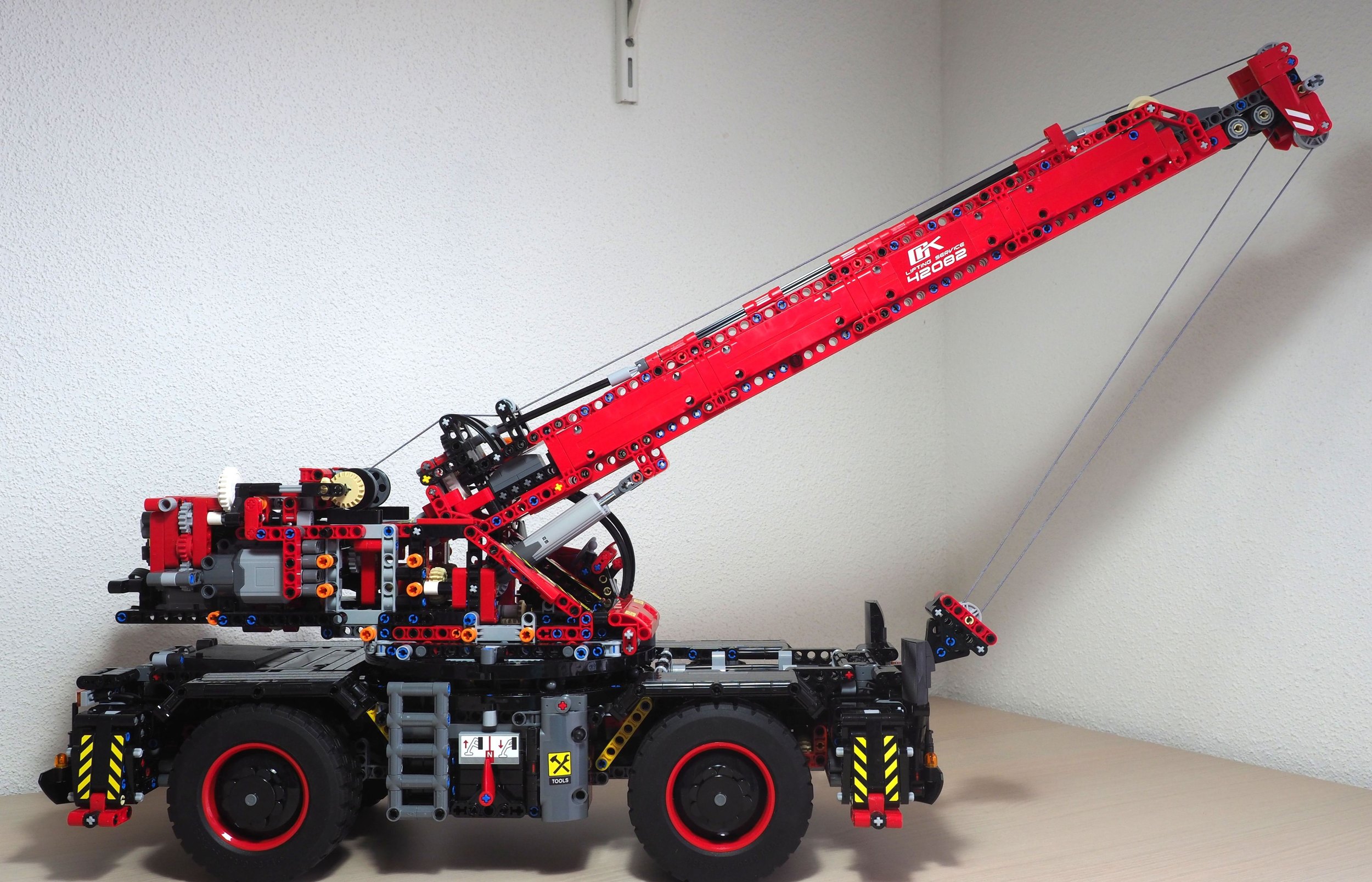
42082 Rough Terrain Crane Full RC MOD

This is my MOD of the official 42082 set. Like many others, I wasn’t happy with the playability of the original set, so I decided to improve it.
Cons of the original set:
- only one function can only work at one time
- you need to constantly move the gear levers to activate the functions
- high complexity of the gearbox results in loss of speed and noise
- driving and steering functions are not motorized
I modified the set by removing the gearboxes and adding motors. Each function got its own motor - a total of 9 motors (2 L motors for driving, 2 servos for steering, 1 M motor for outriggers and 4 L motors for the crane itself).
The crane and chassis are powered separately and completely independent of each other. A nice feature - 3 types of steering - normal, full and crab. Despite the weight, the model has decent torque and speed, all functions can be controlled remotely and work simultaneously.
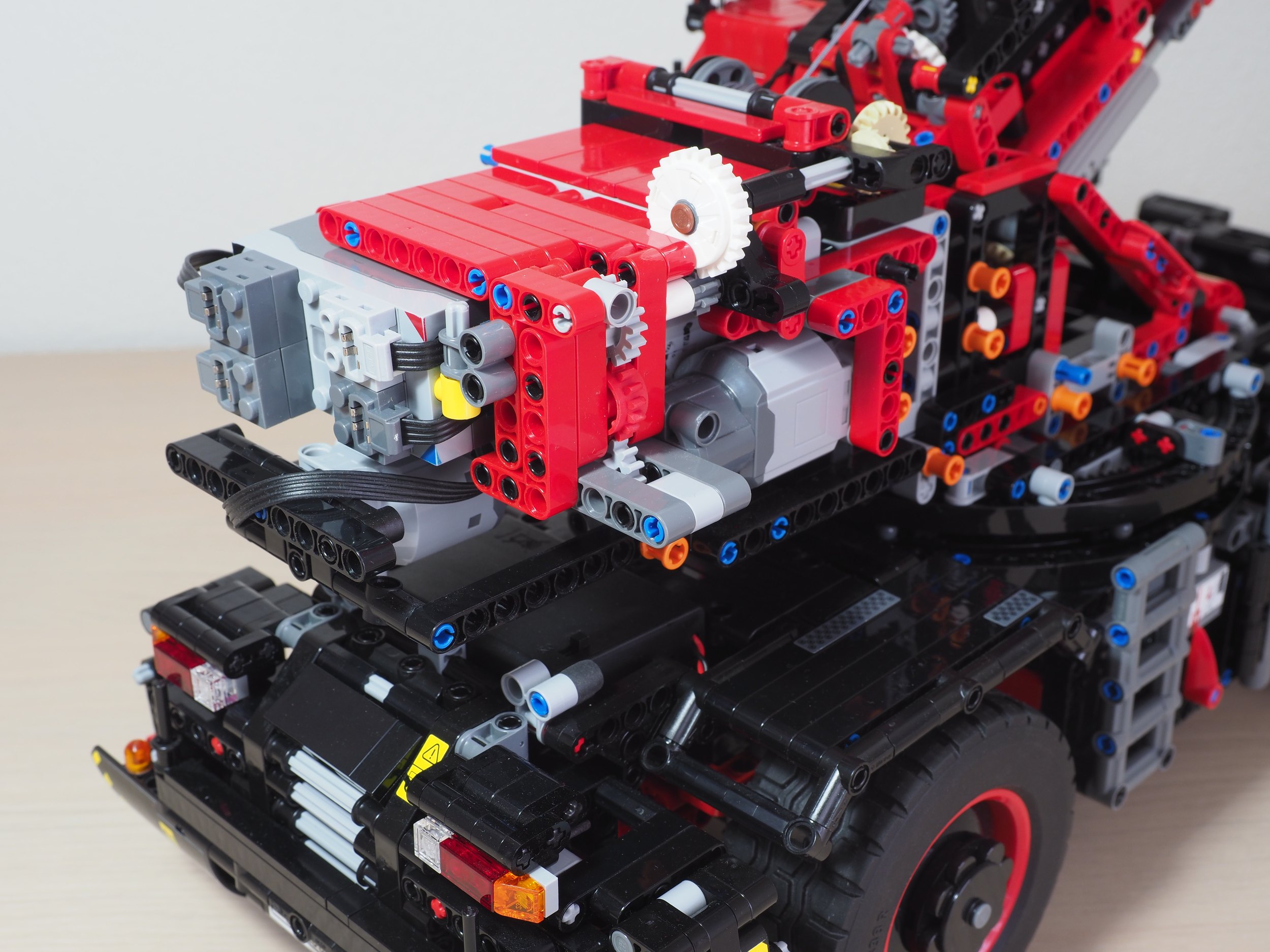
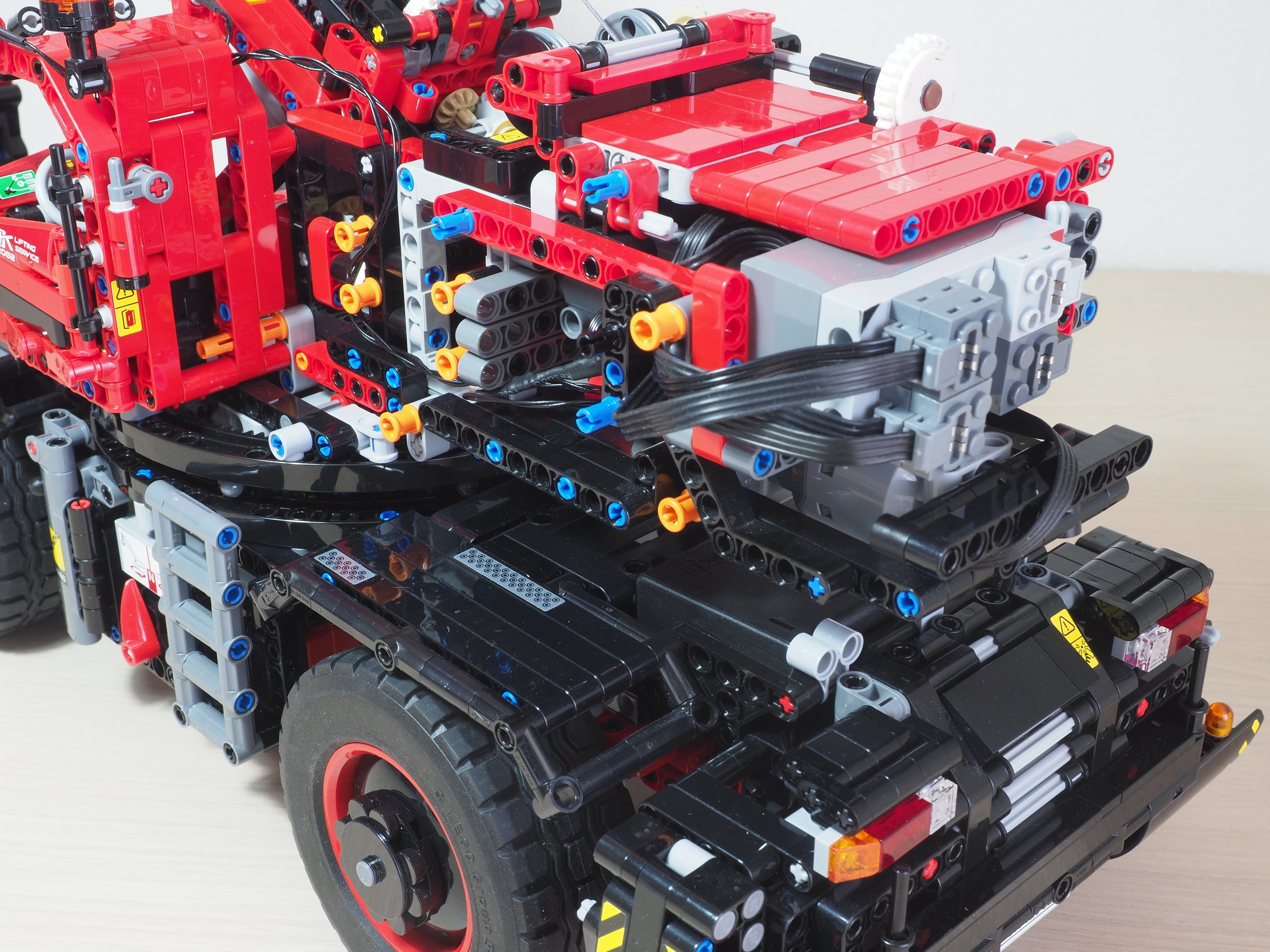
I didn’t try to keep the look of the original model, so I completely removed the unnecessary gearbox shifters and covered the remaining holes with system panels. I also didn’t keep the fake engine - the LiPo battery took its place. In my eyes, this improved the look of the model, making it more realistic.
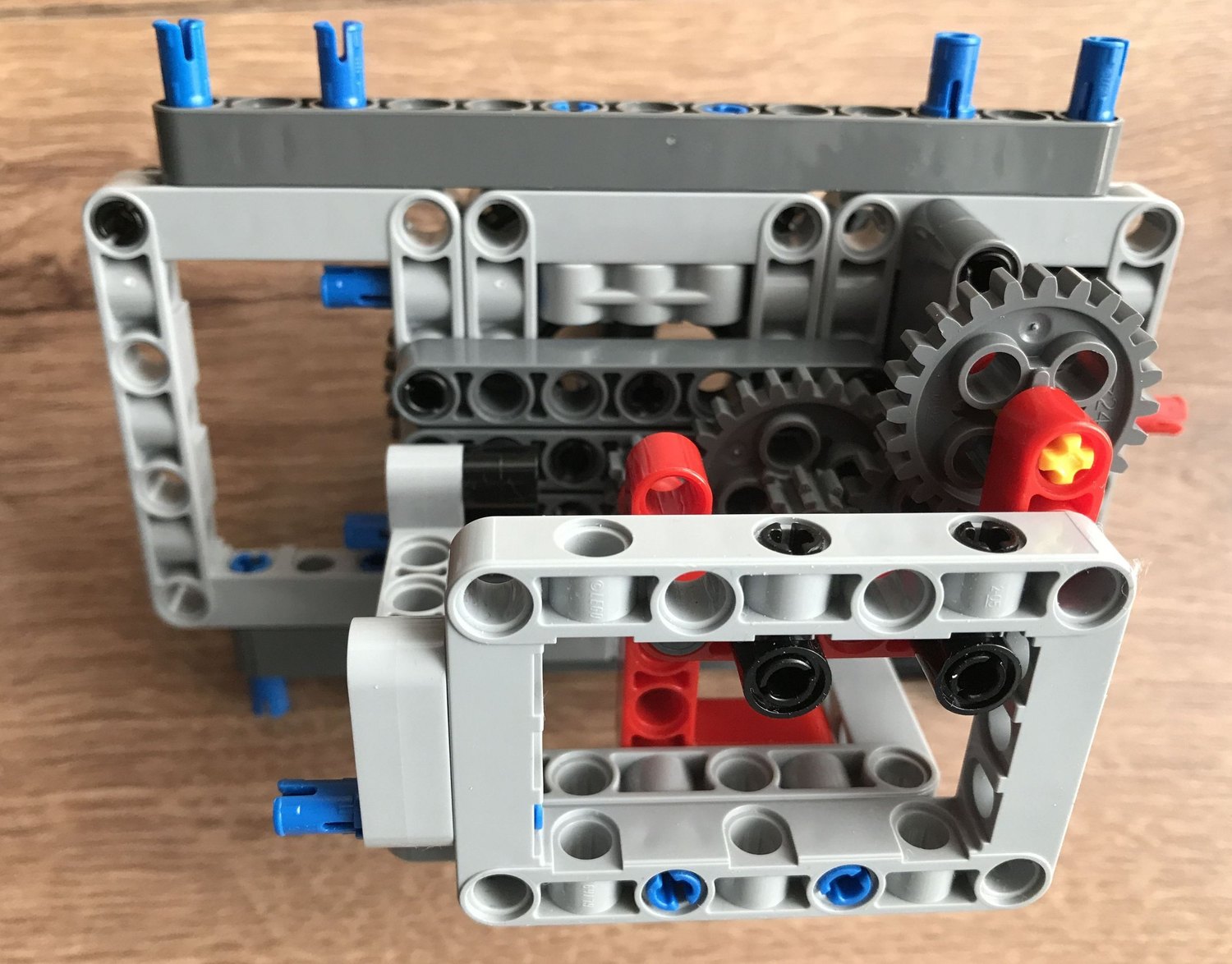
Crane
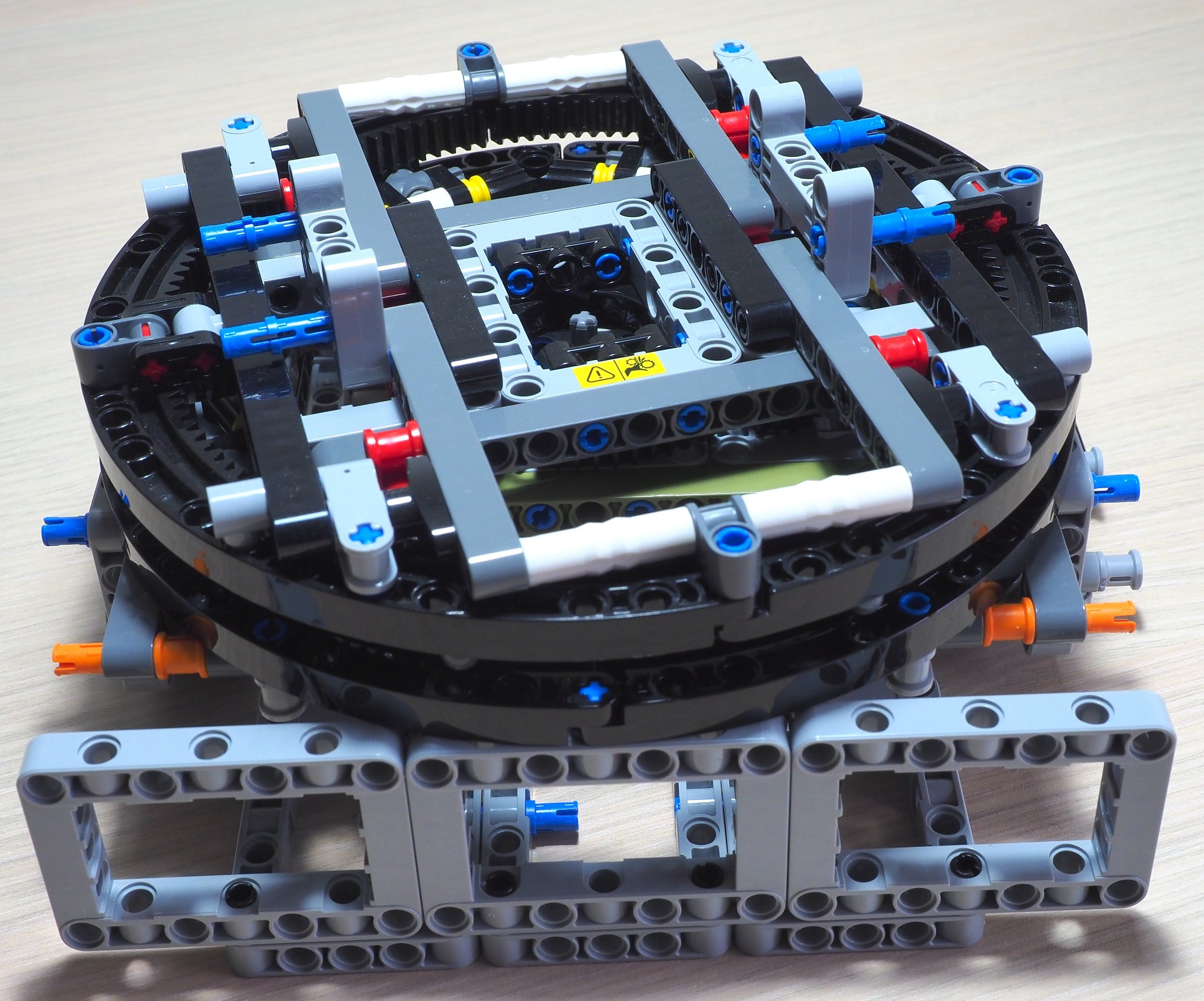
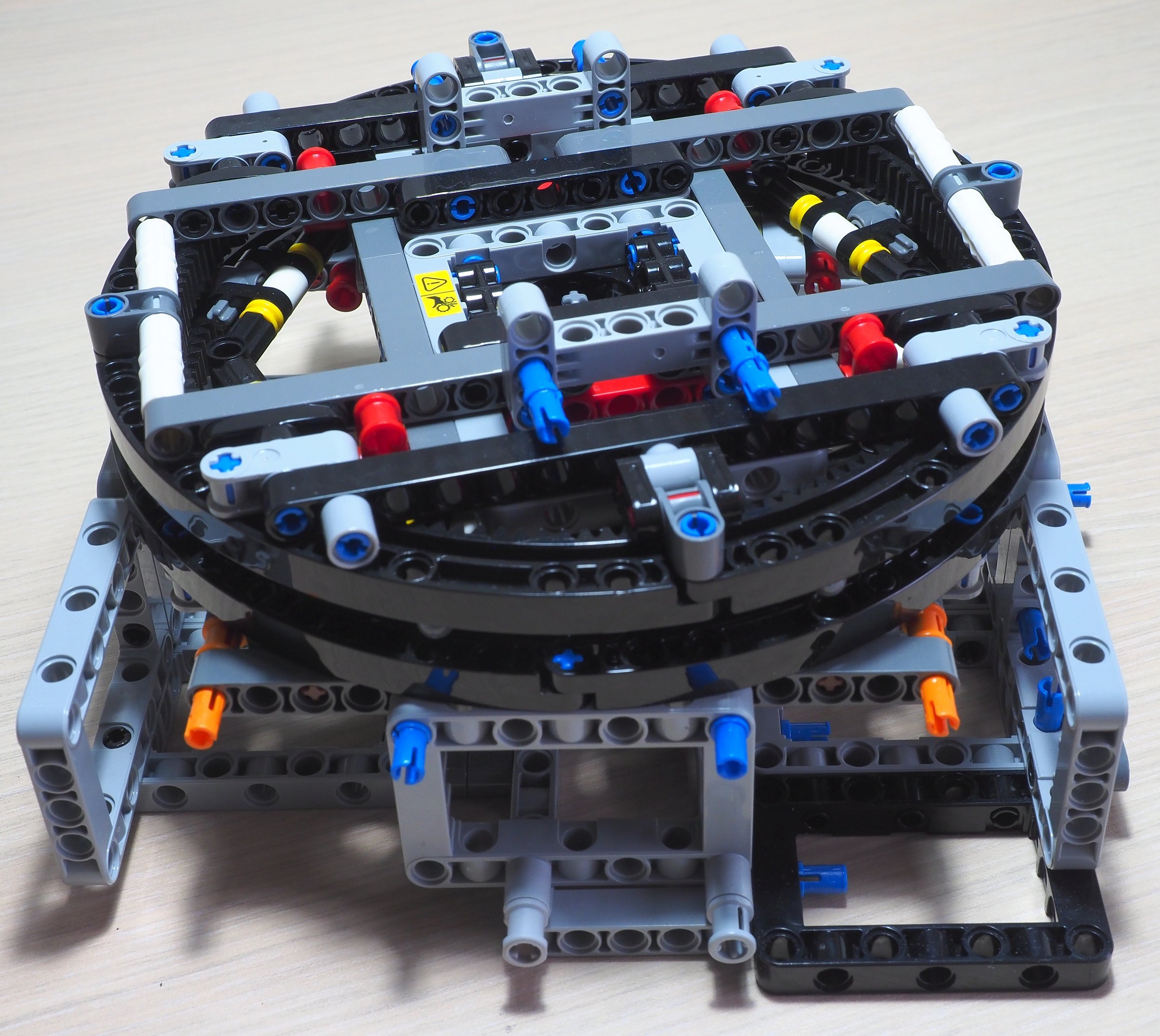
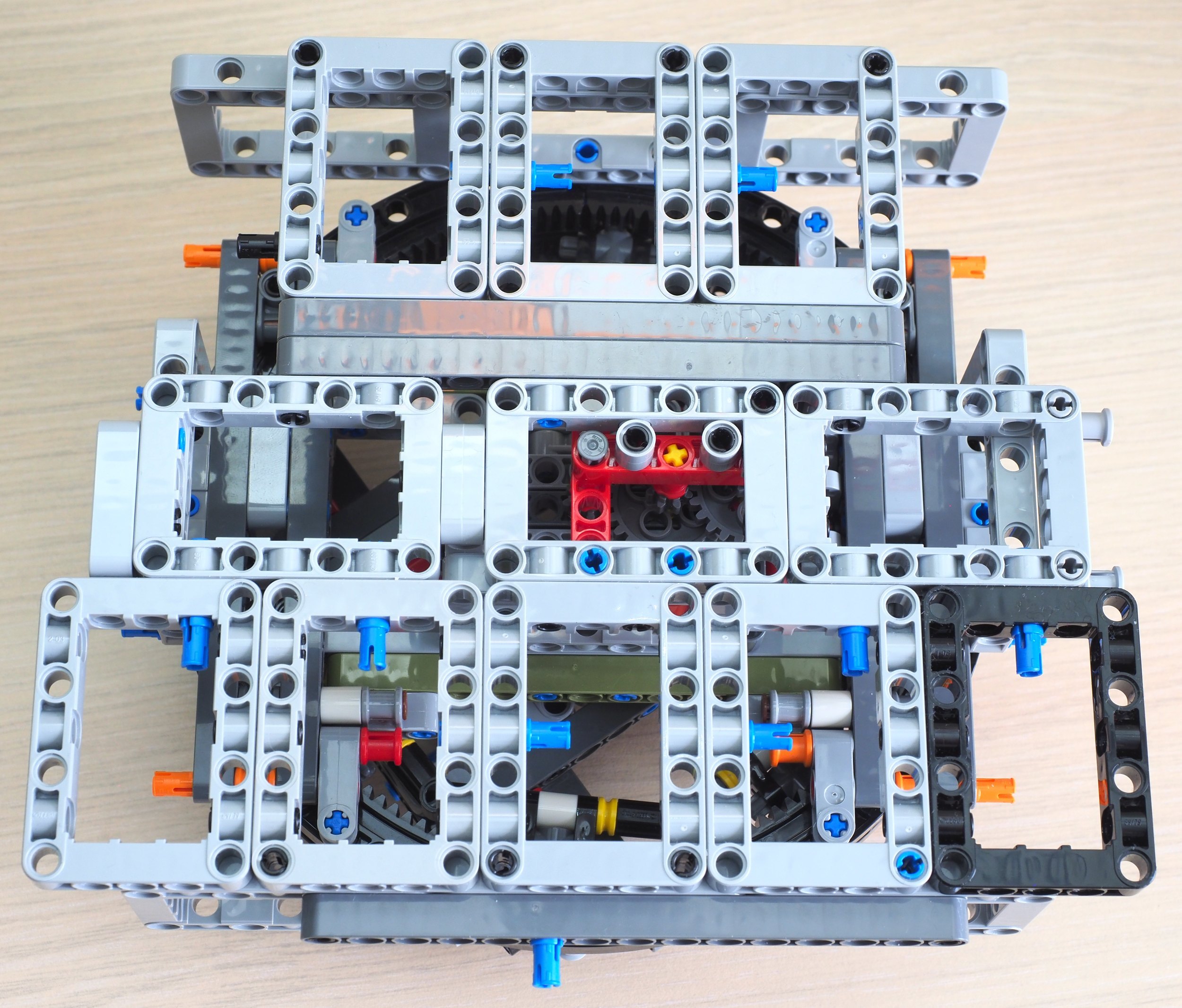
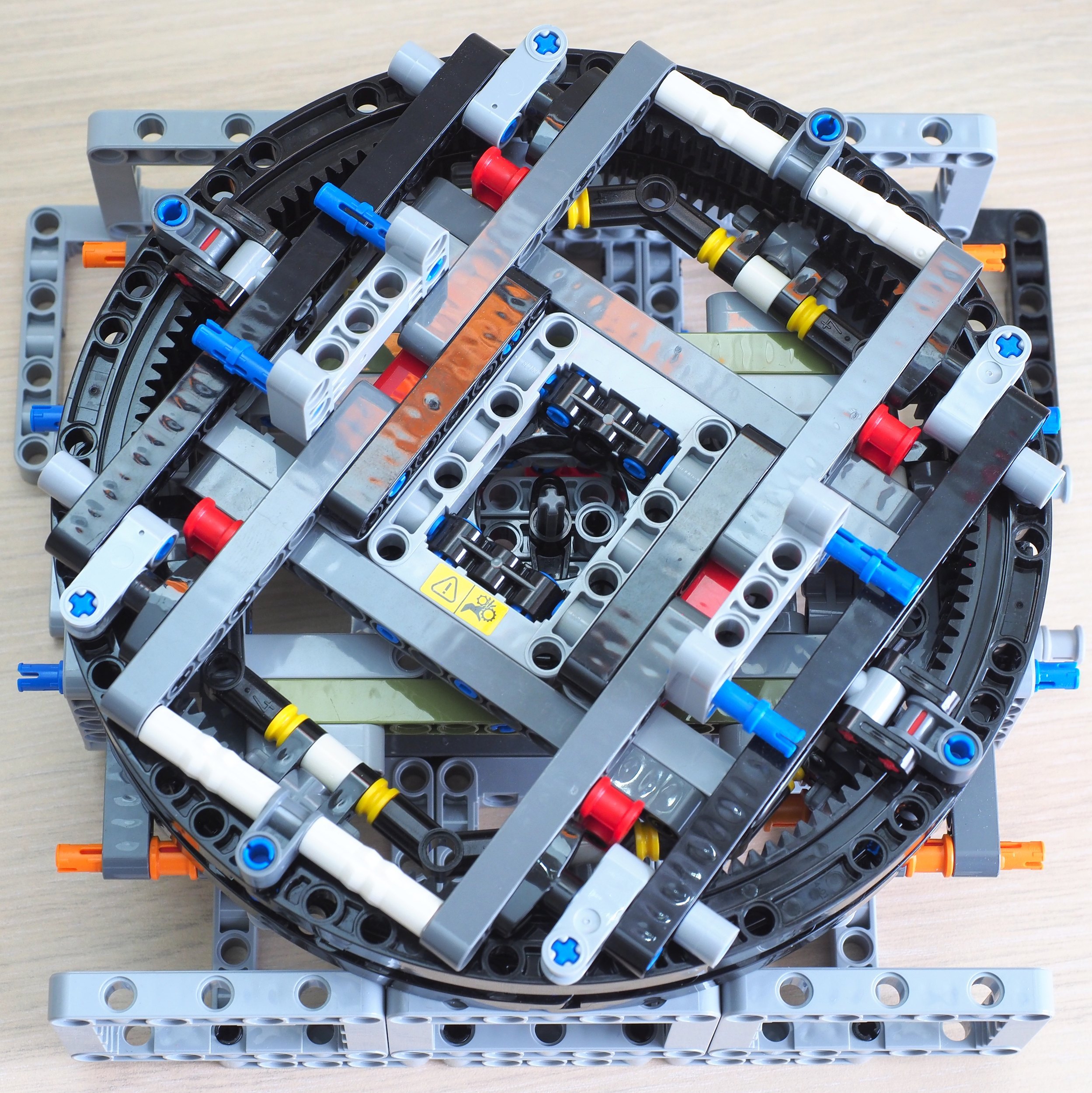
I started with the crane and built a temporary base with a rotating mechanism so that I could work exclusively with the crane. By removing the gearbox, I had enough space for the motors and the CaDA unit. Each crane function (boom height/length, winch, and rotation) got its own L motor - a total of four motors.
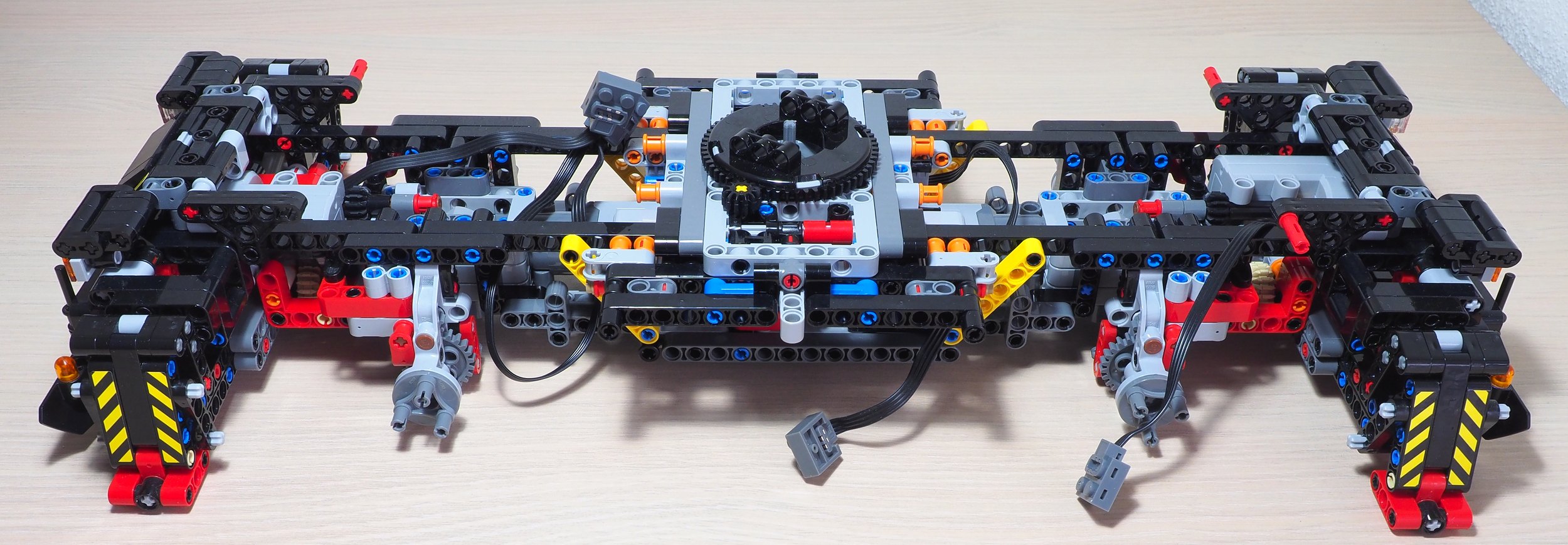
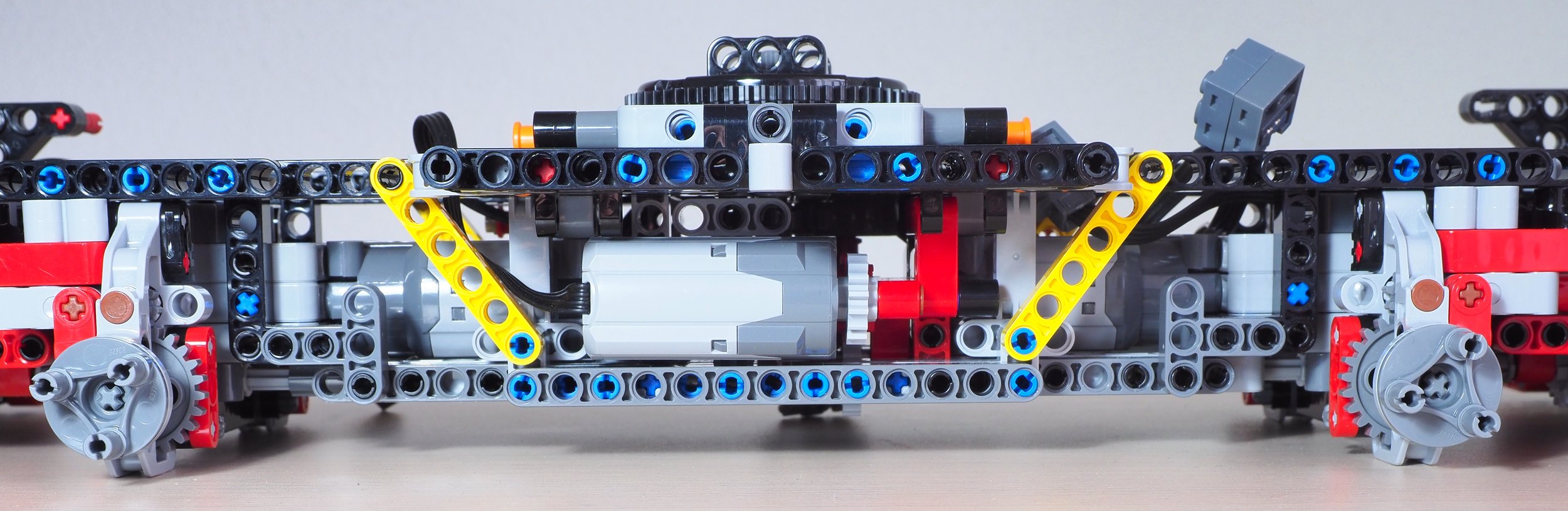
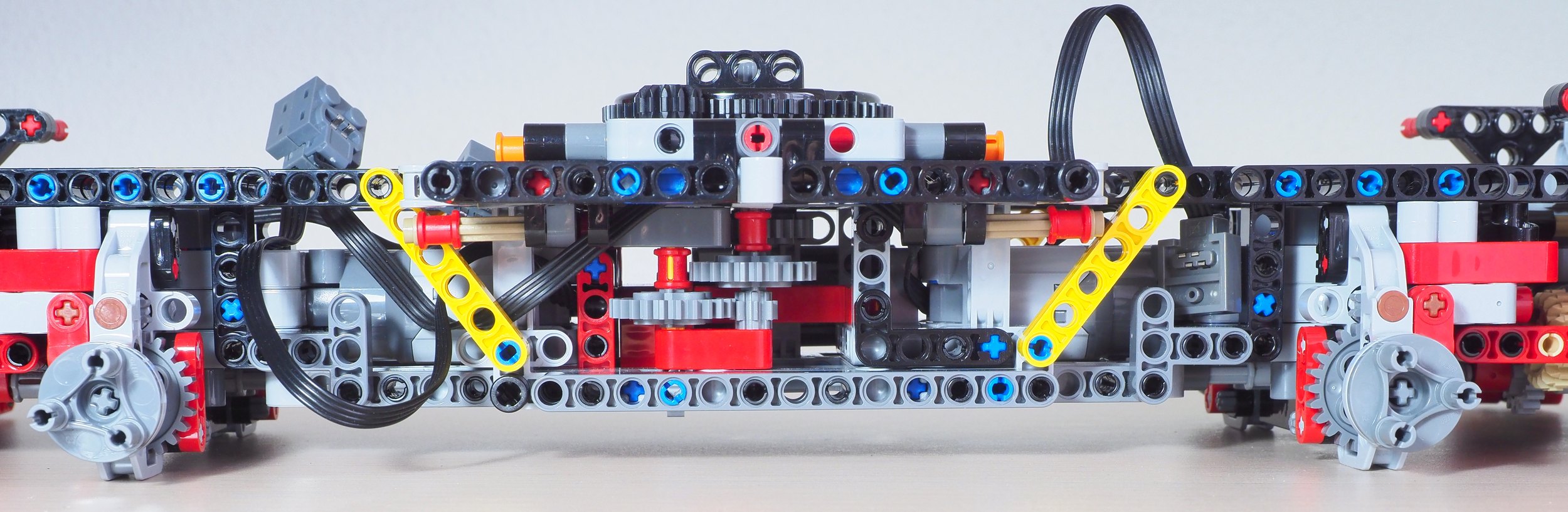
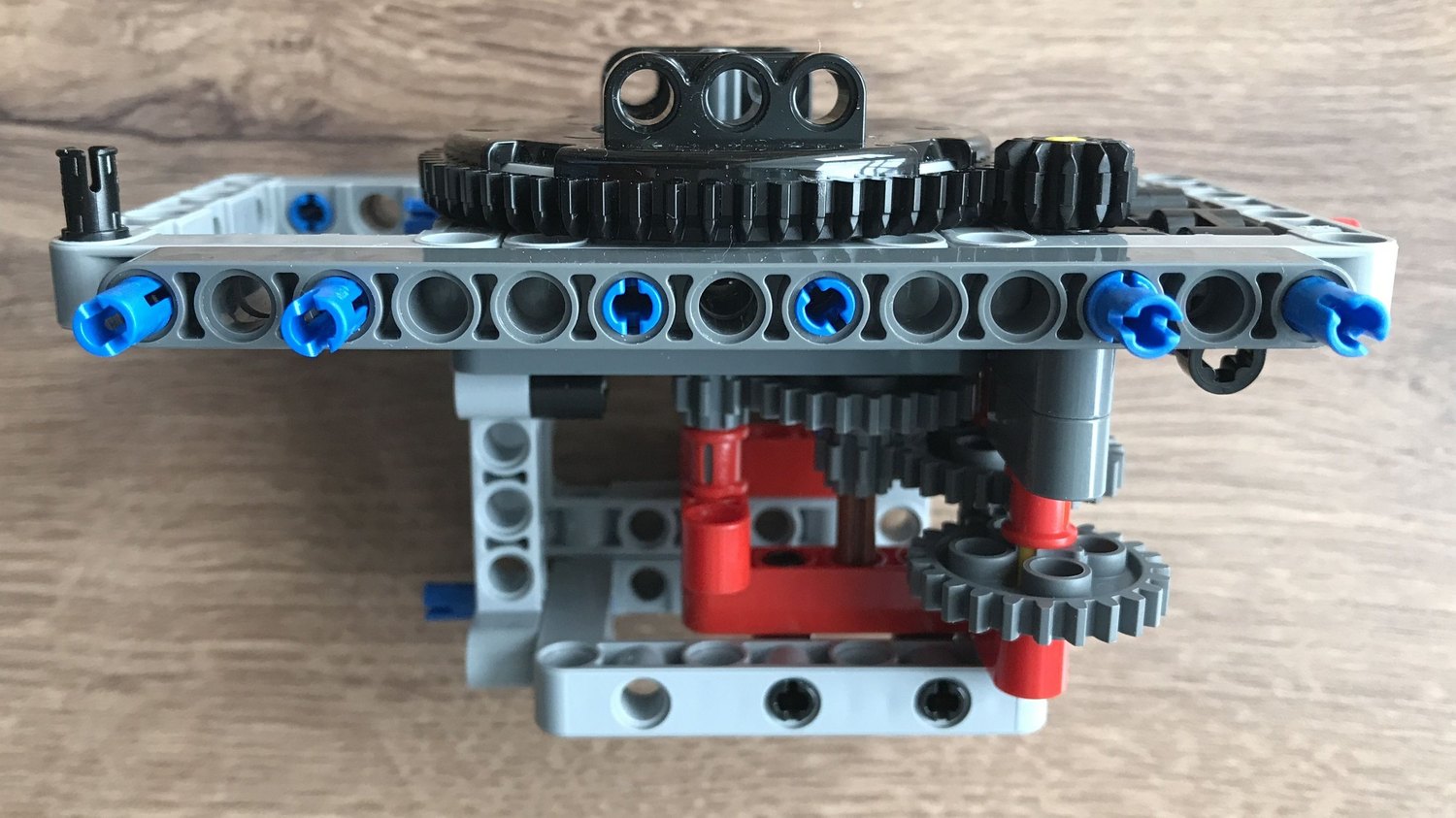
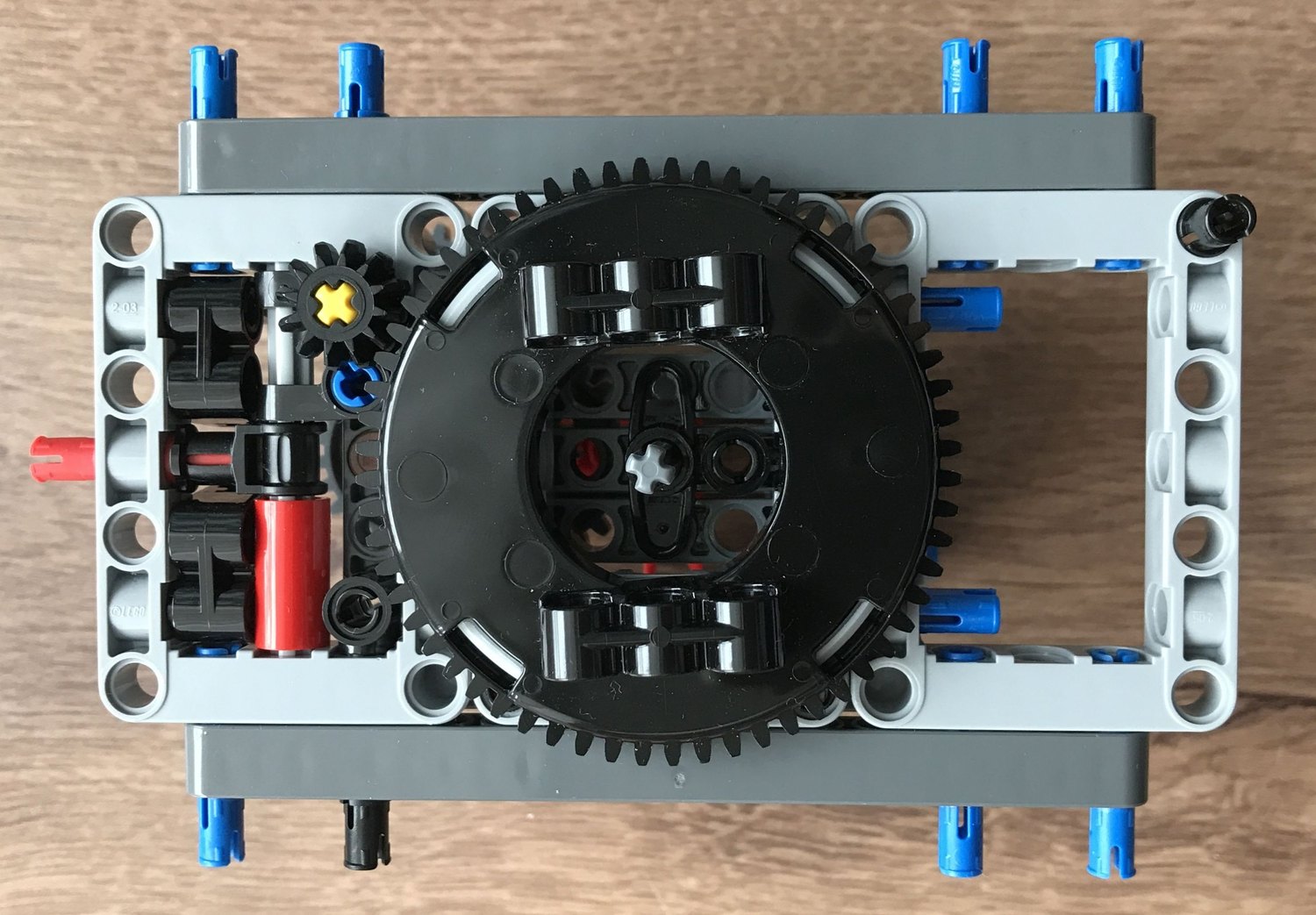
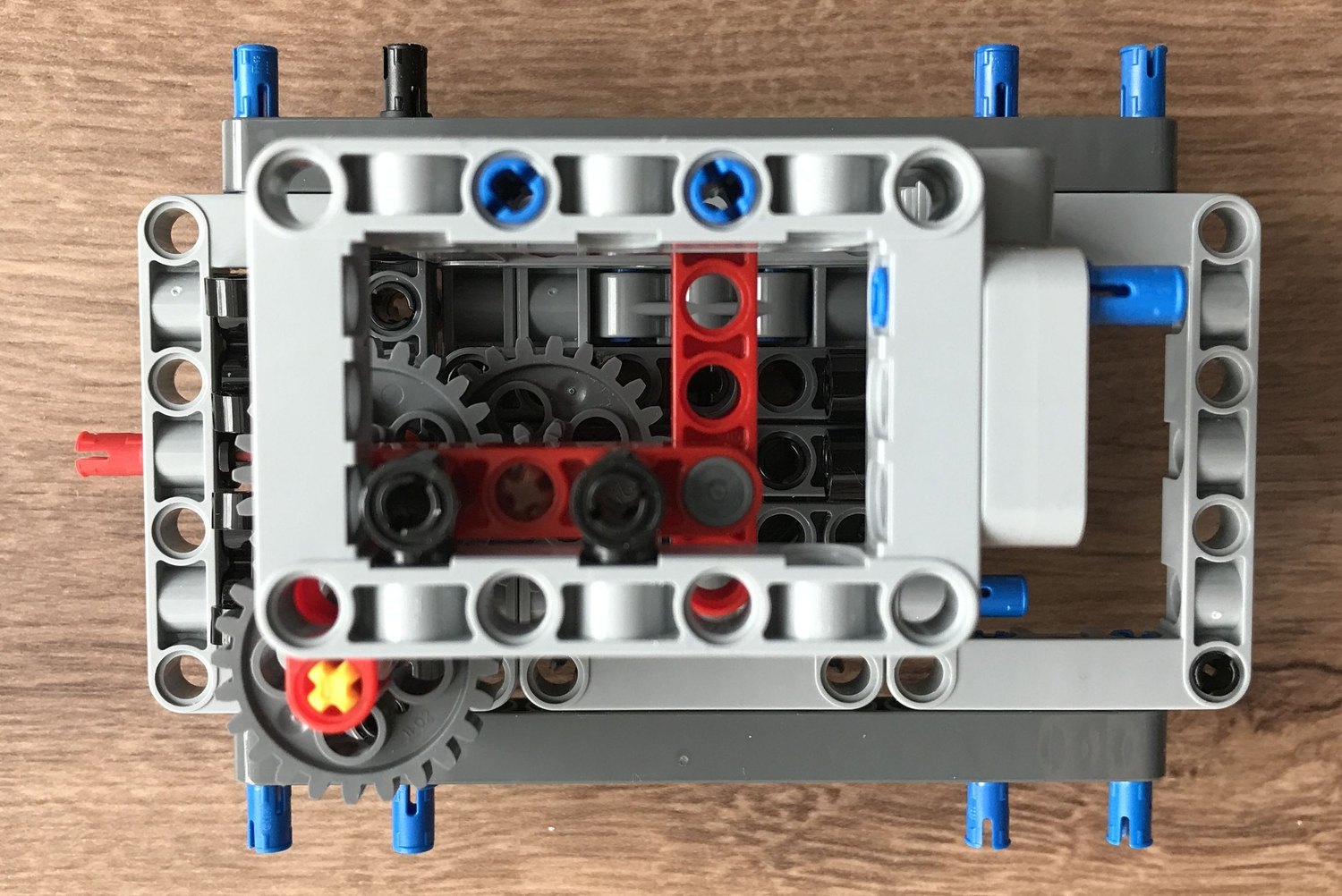
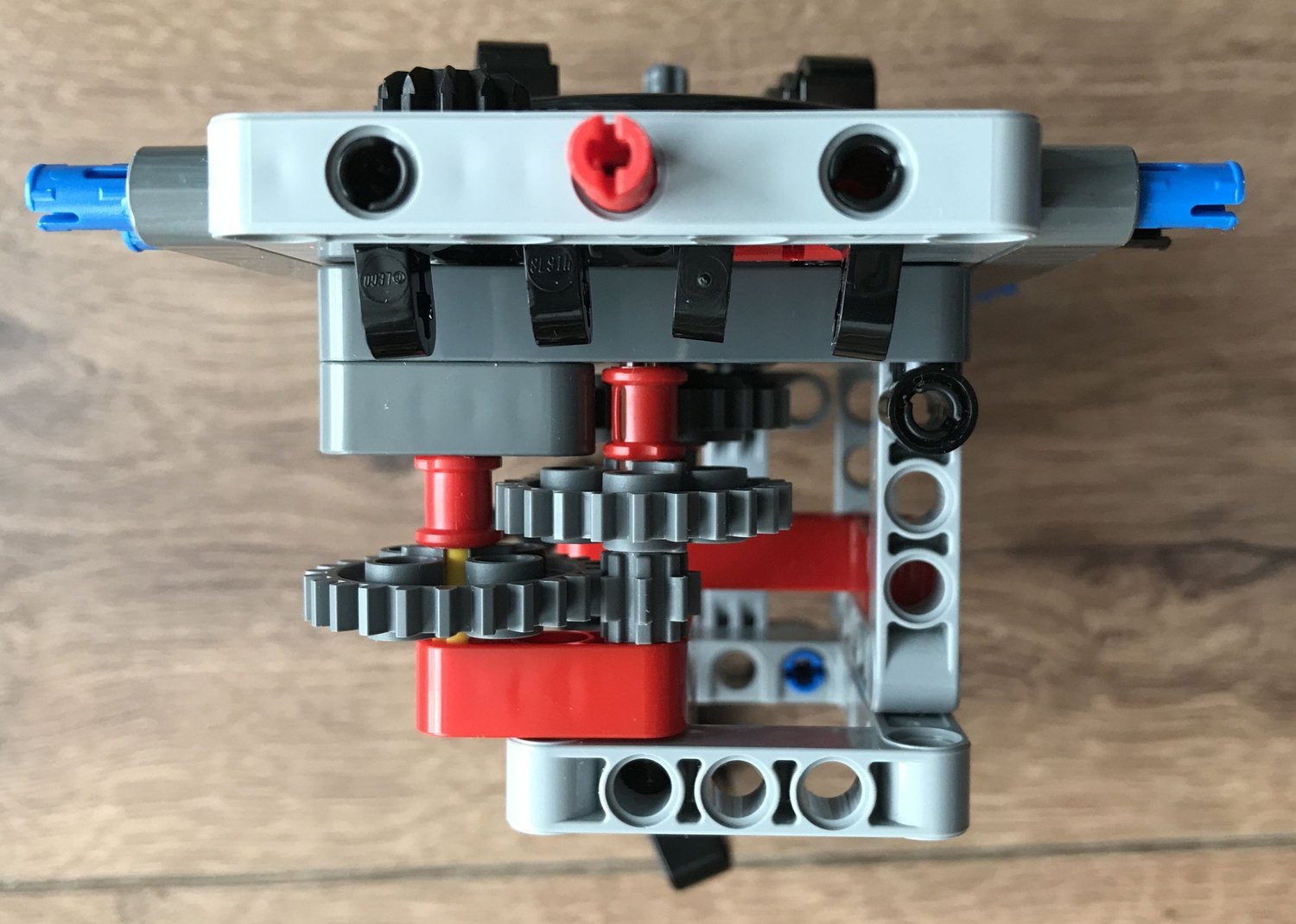
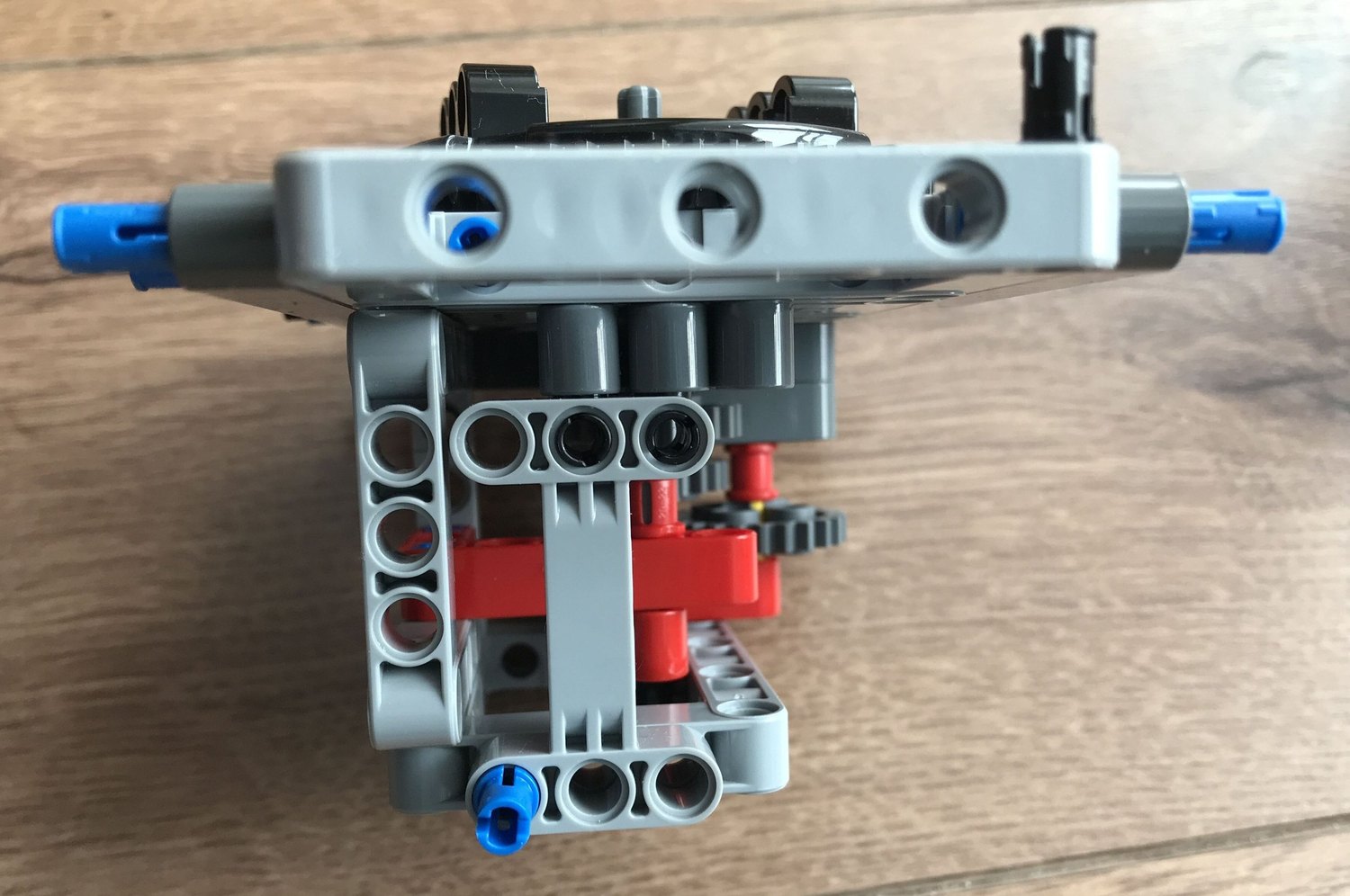
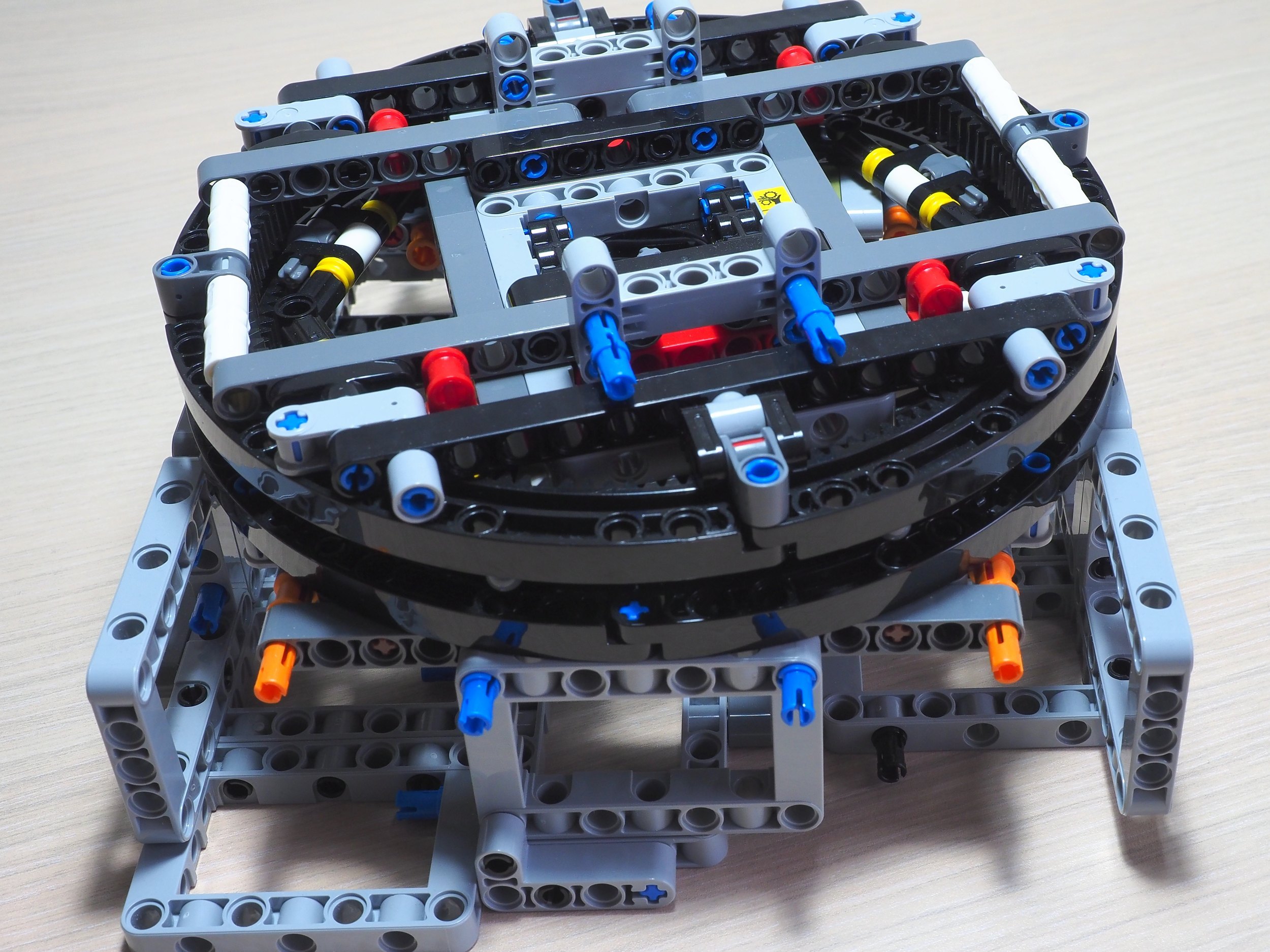
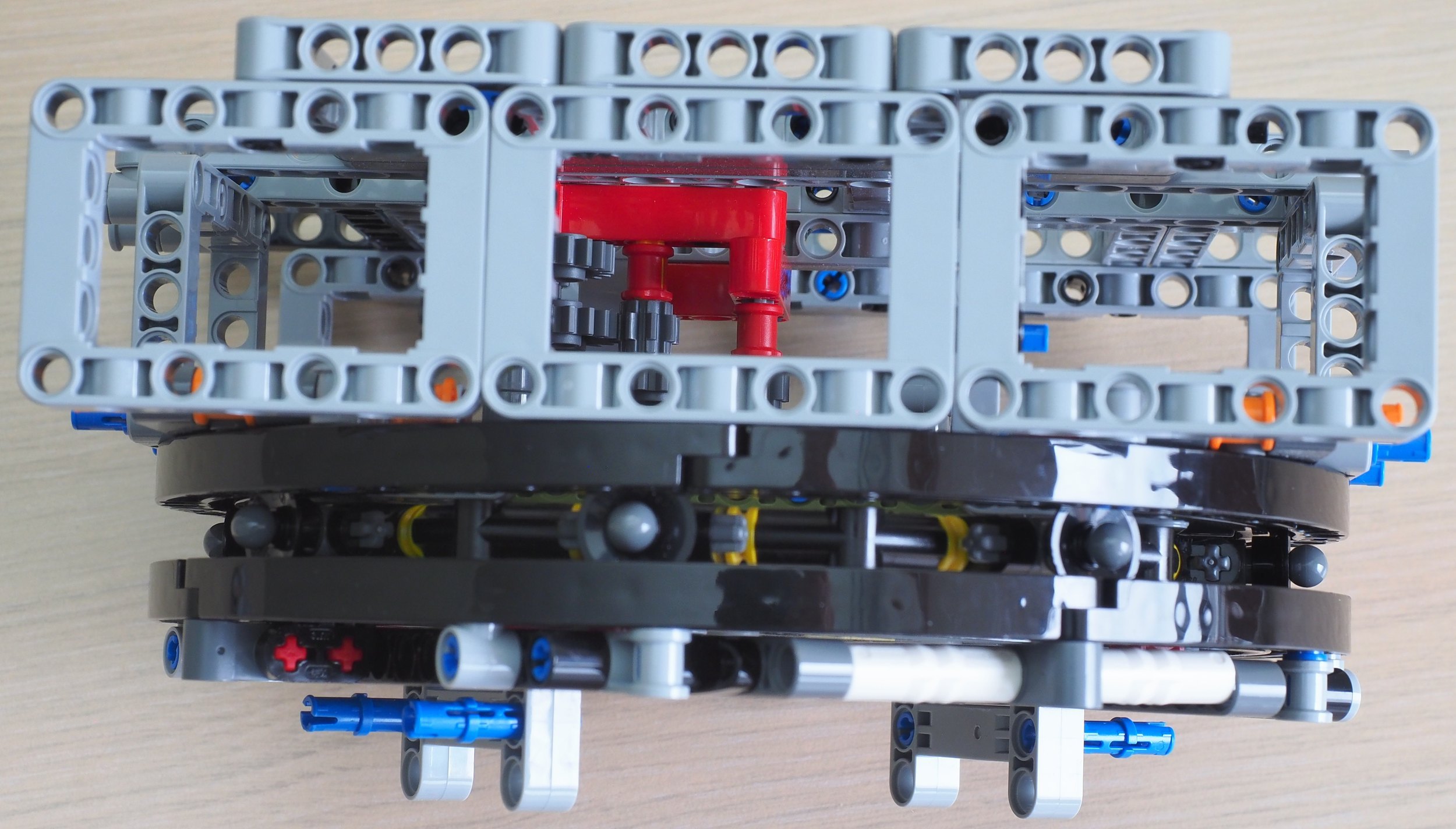
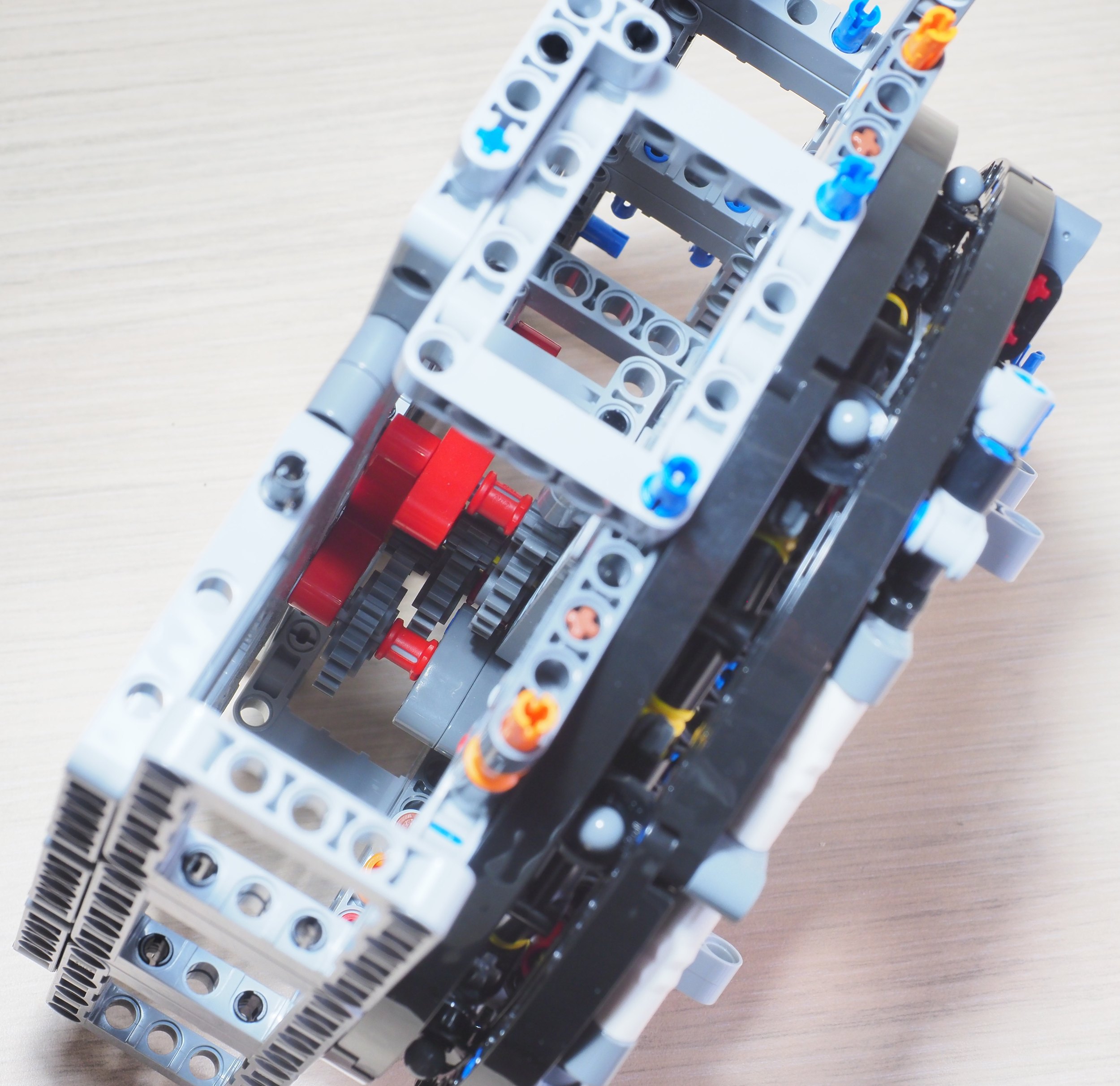
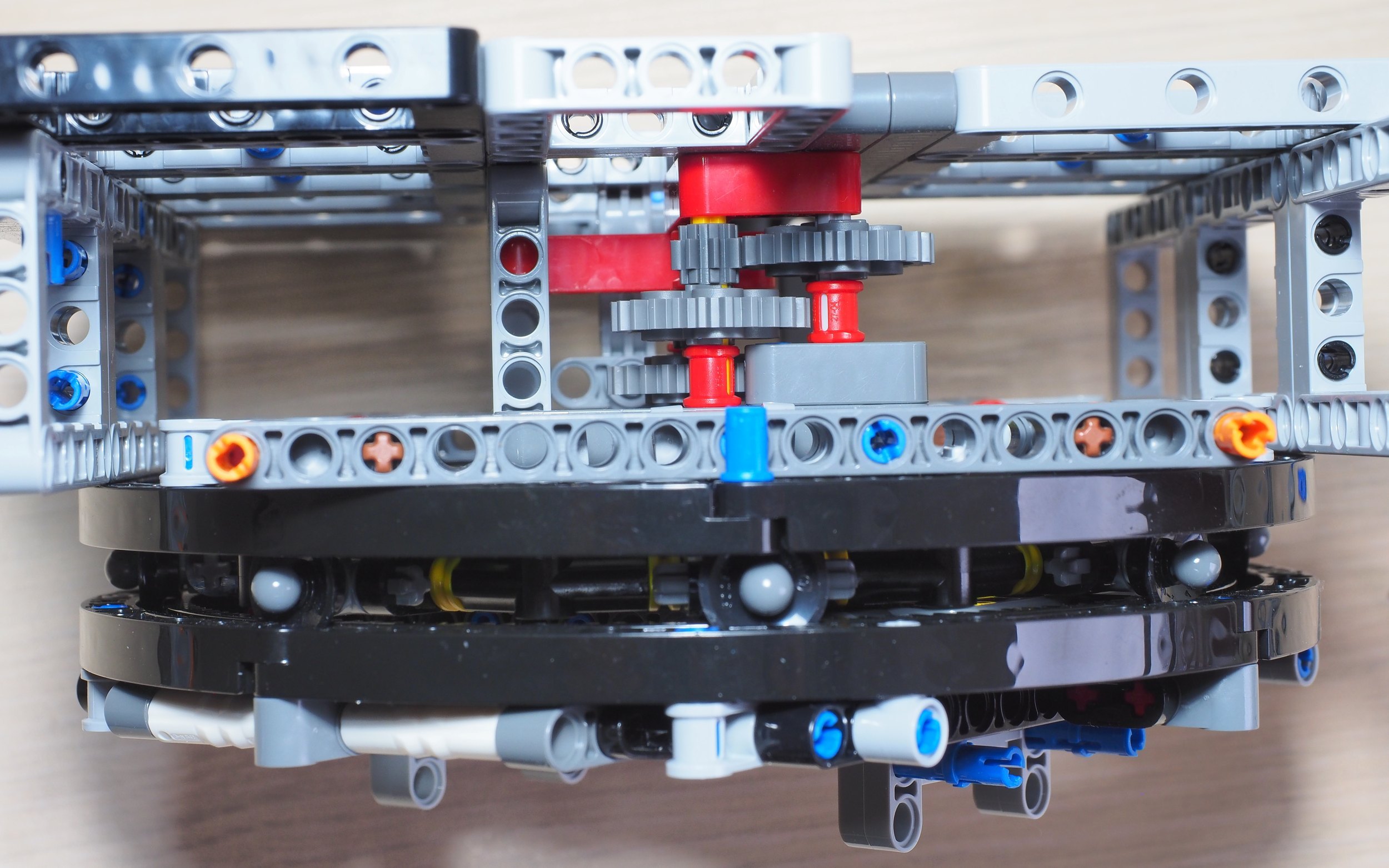
Motorizing the crane didn’t cause any major difficulties, except for the rotation mechanism. After trying different options, I placed the reduction mechanism in the chassis, which allowed for smooth crane rotation.
The final gear ratio of the rotation mechanism is 168.75:1 (16:20 (inside of the crane) -> 8:24 -> 8:24 -> 8:24 -> 12:60).
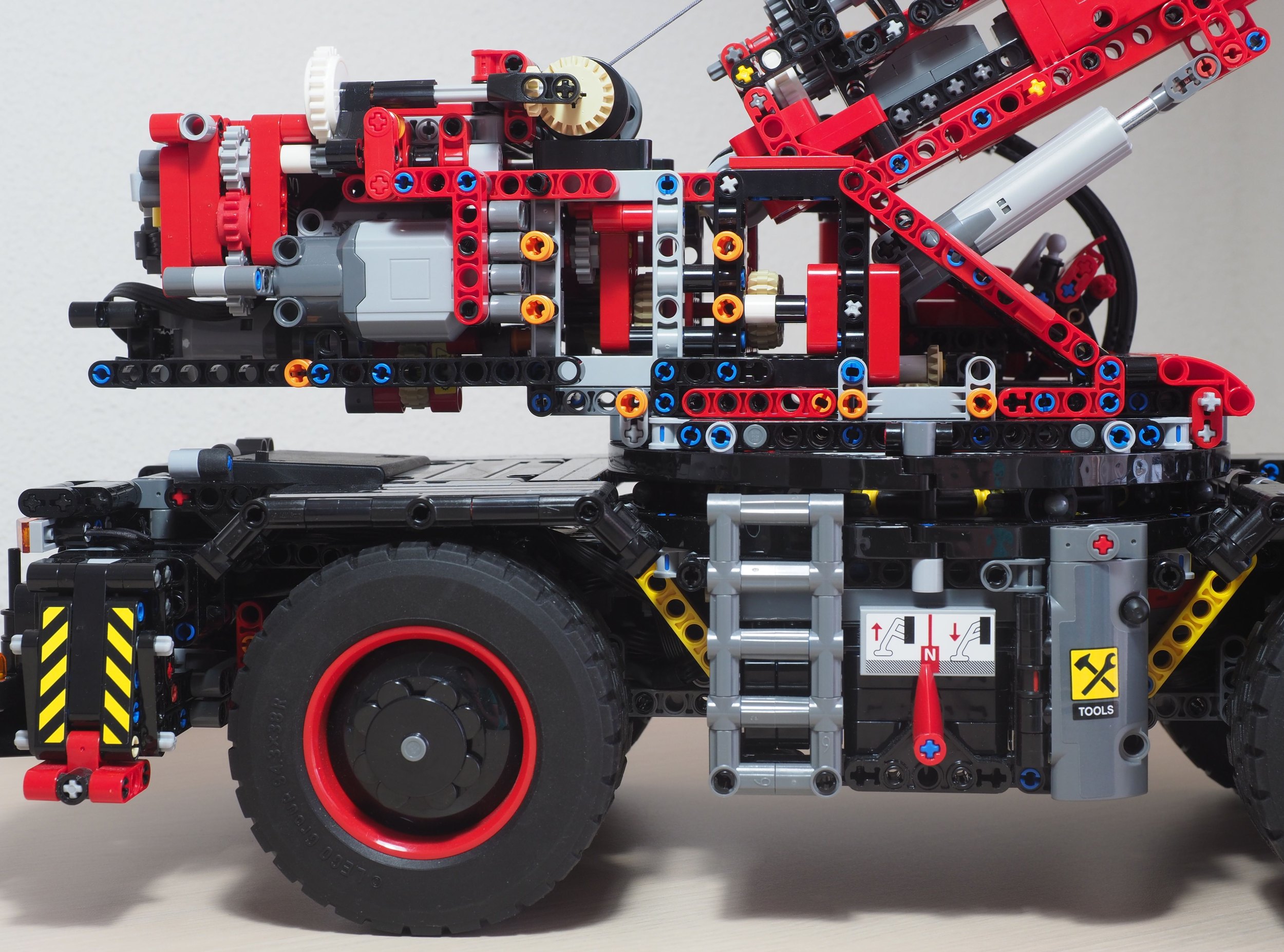
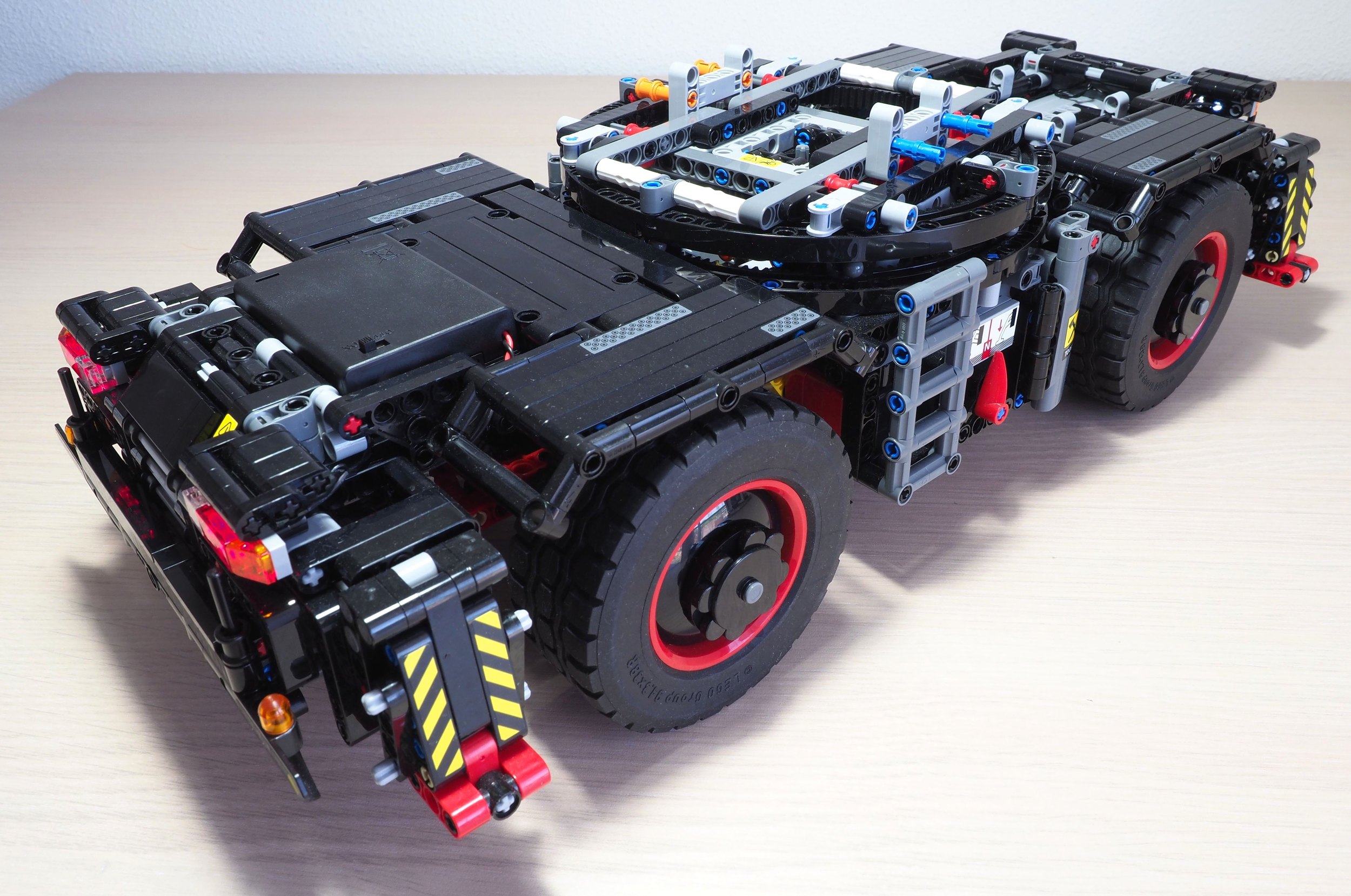
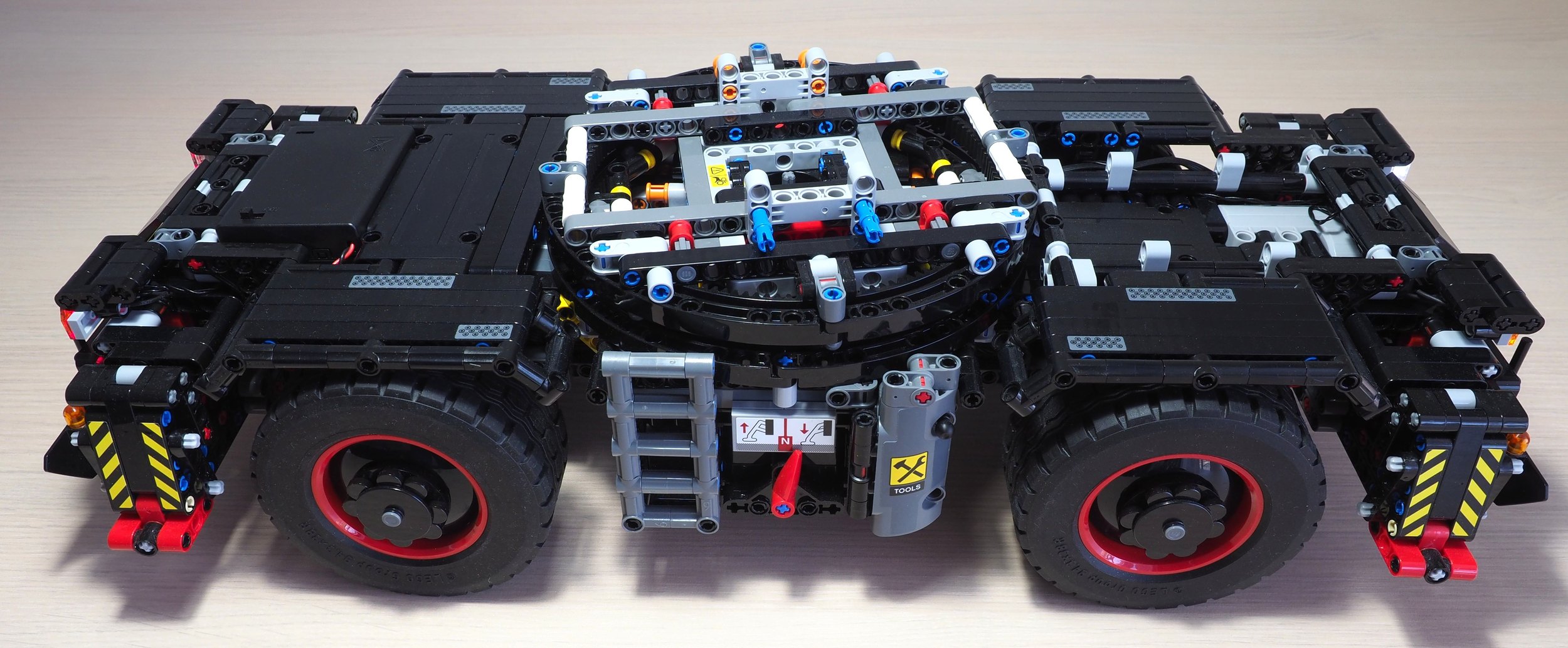
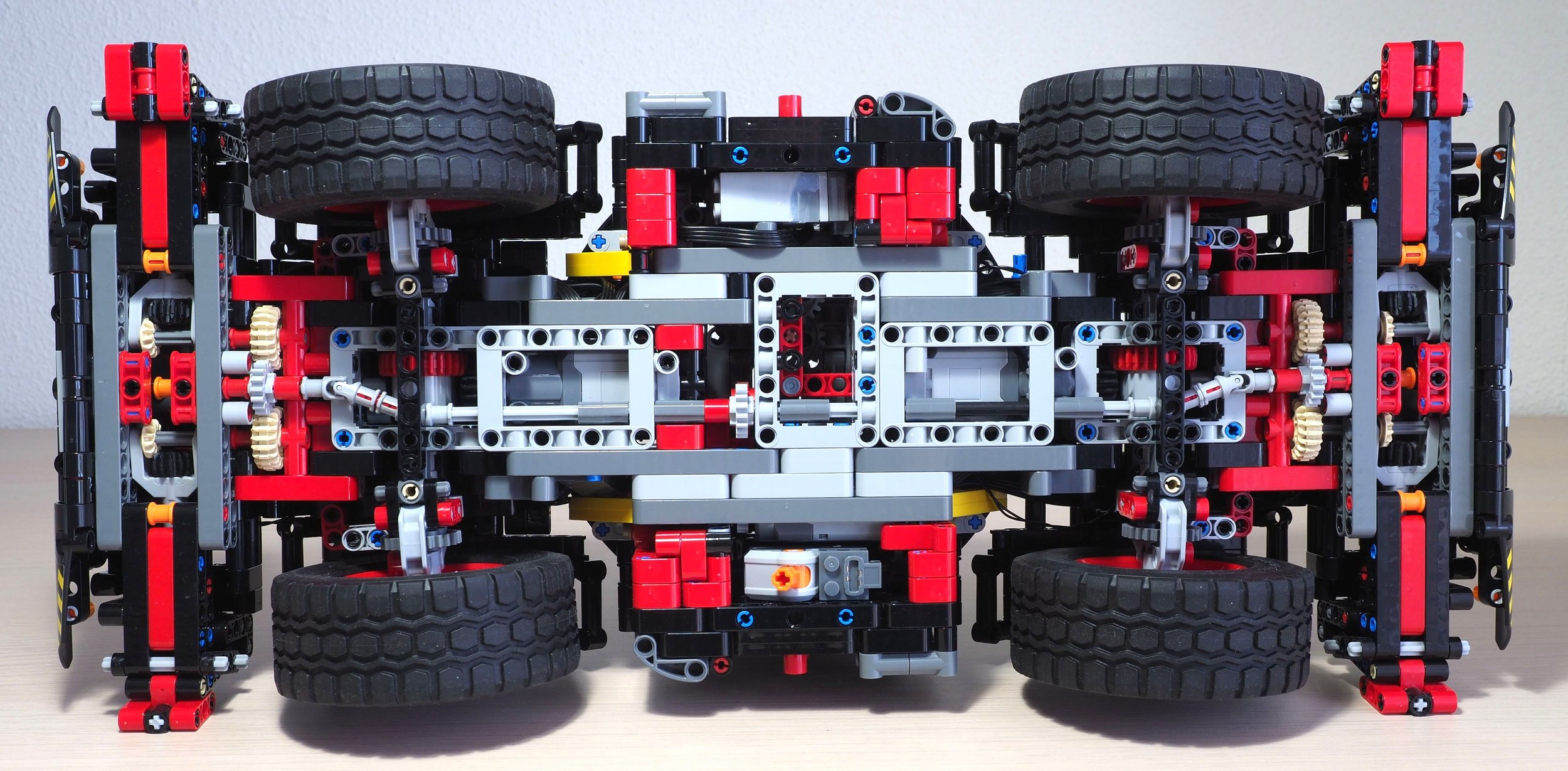
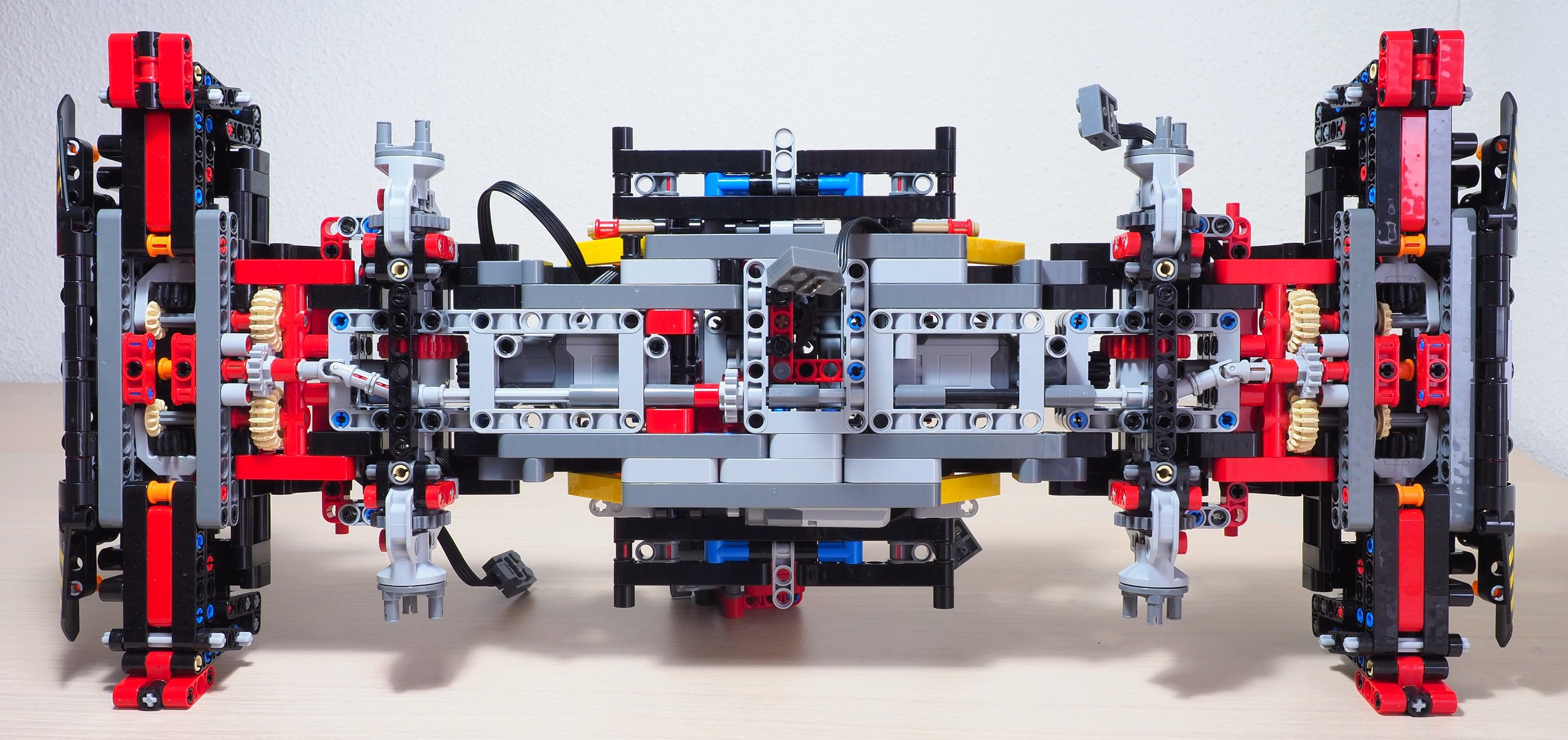
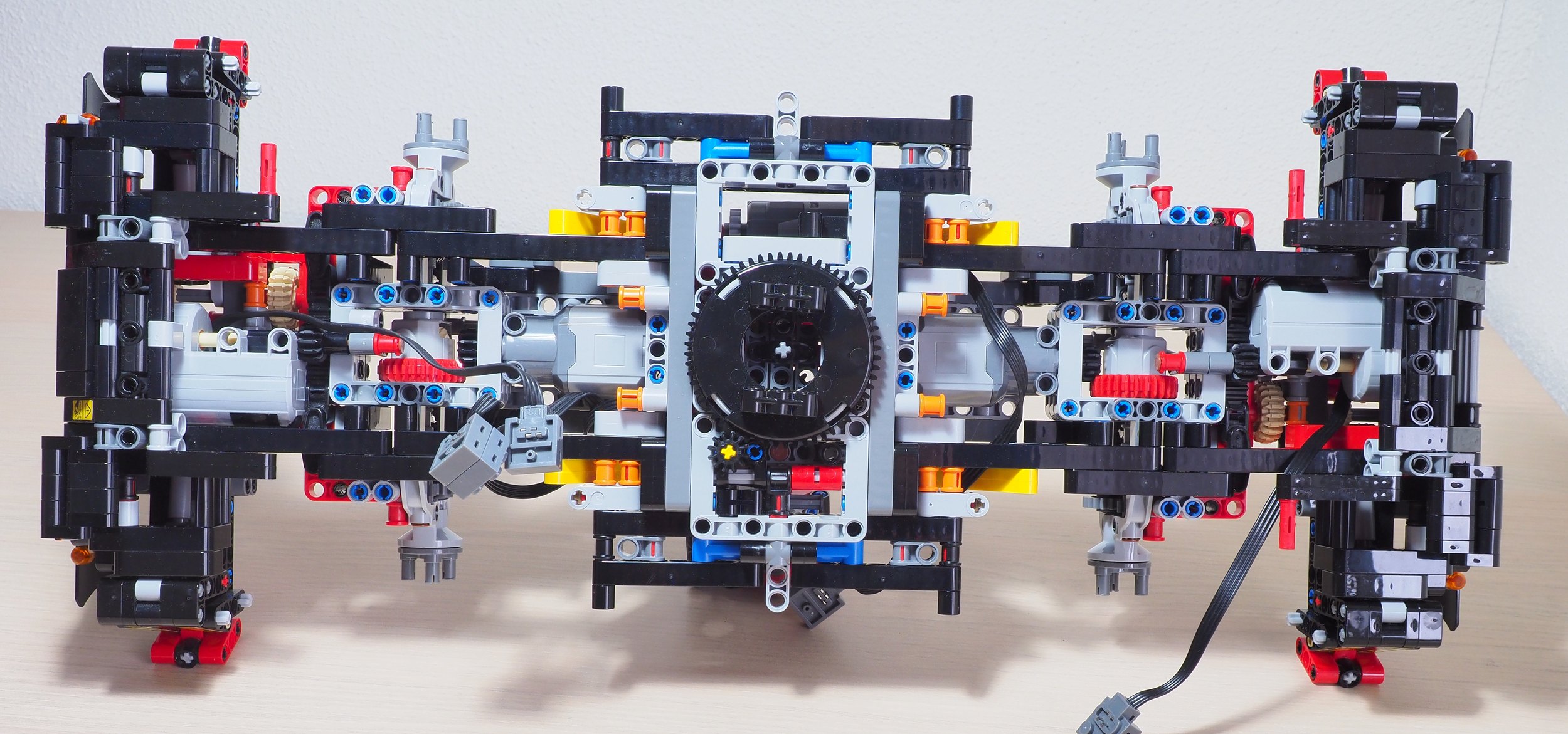
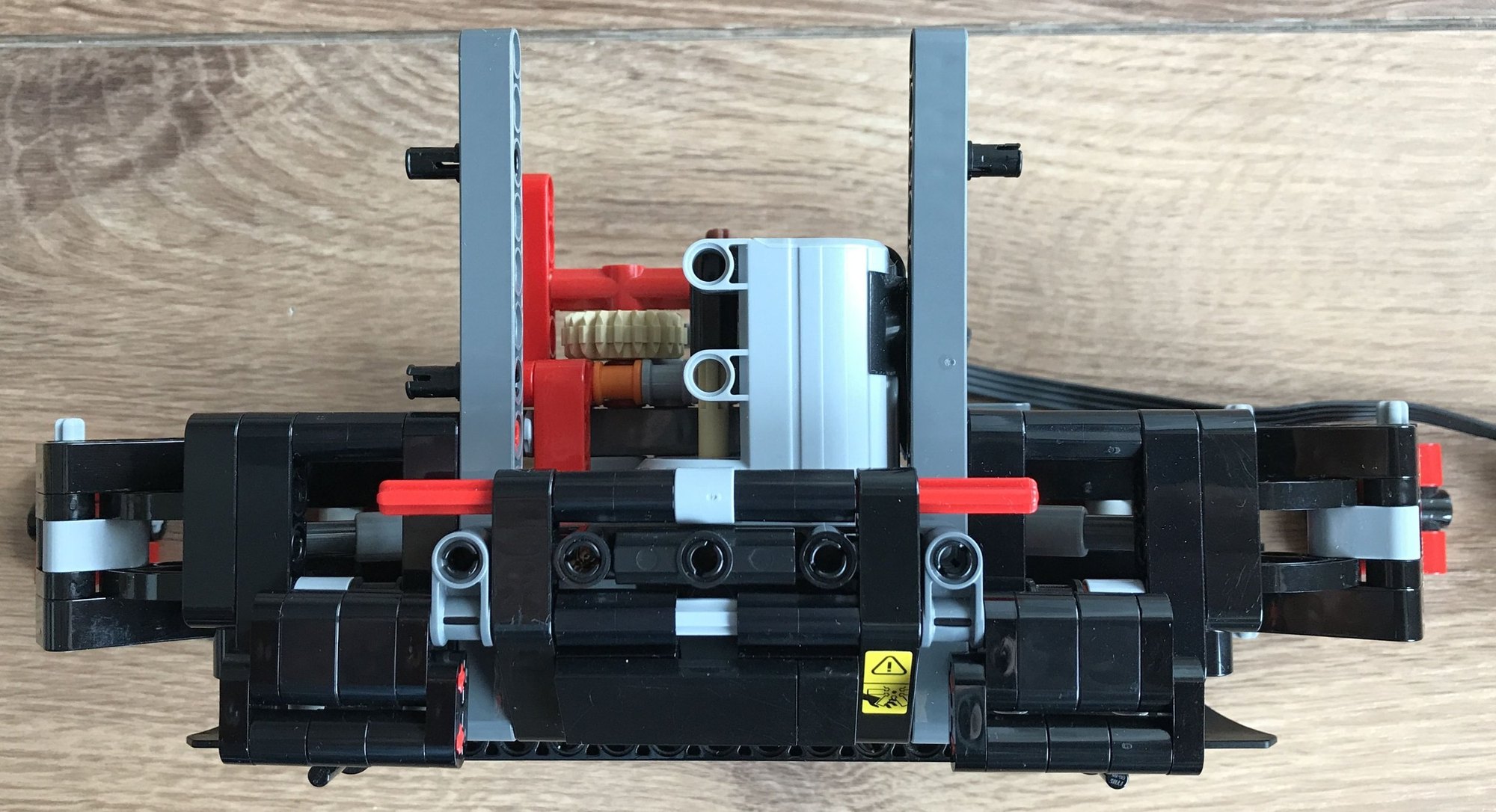
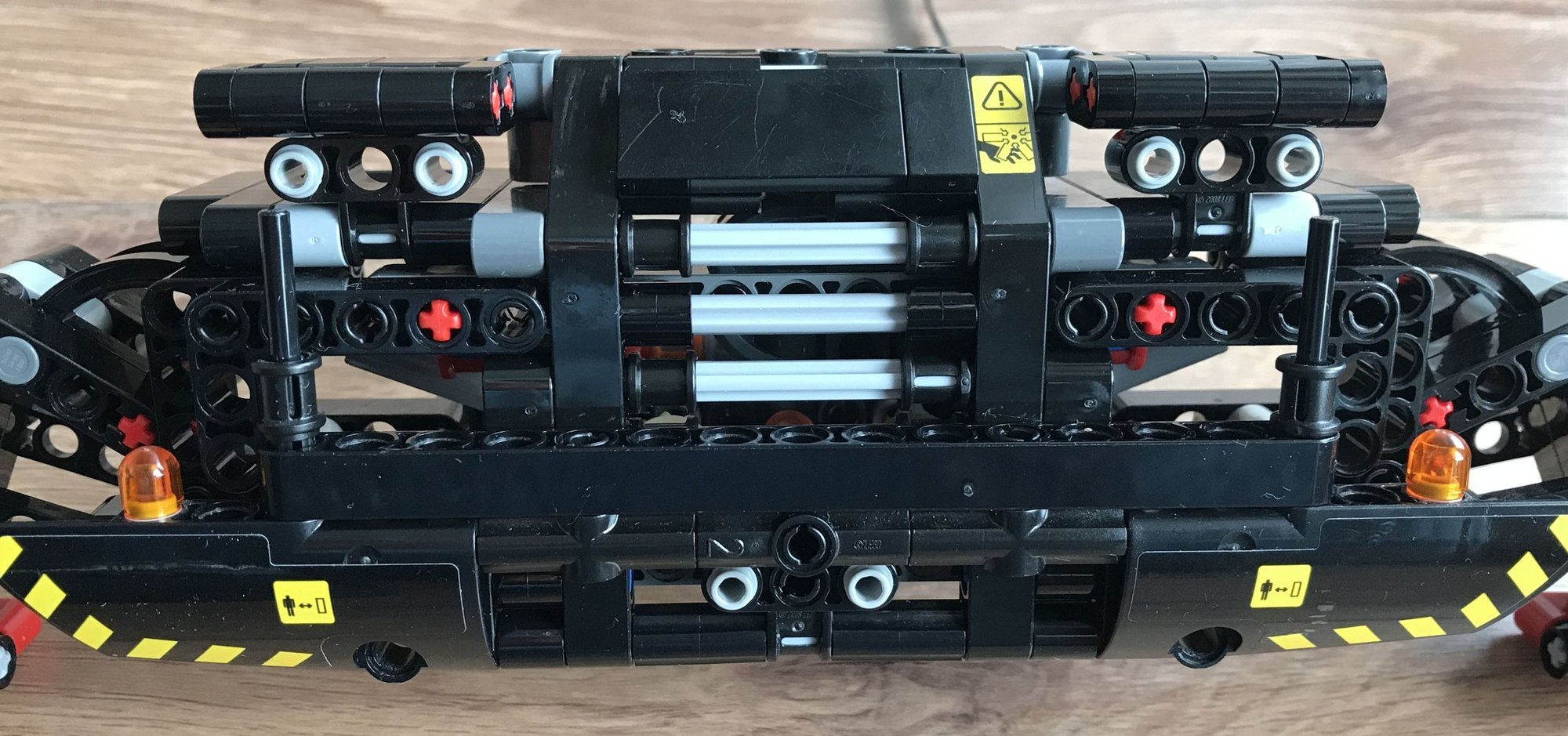
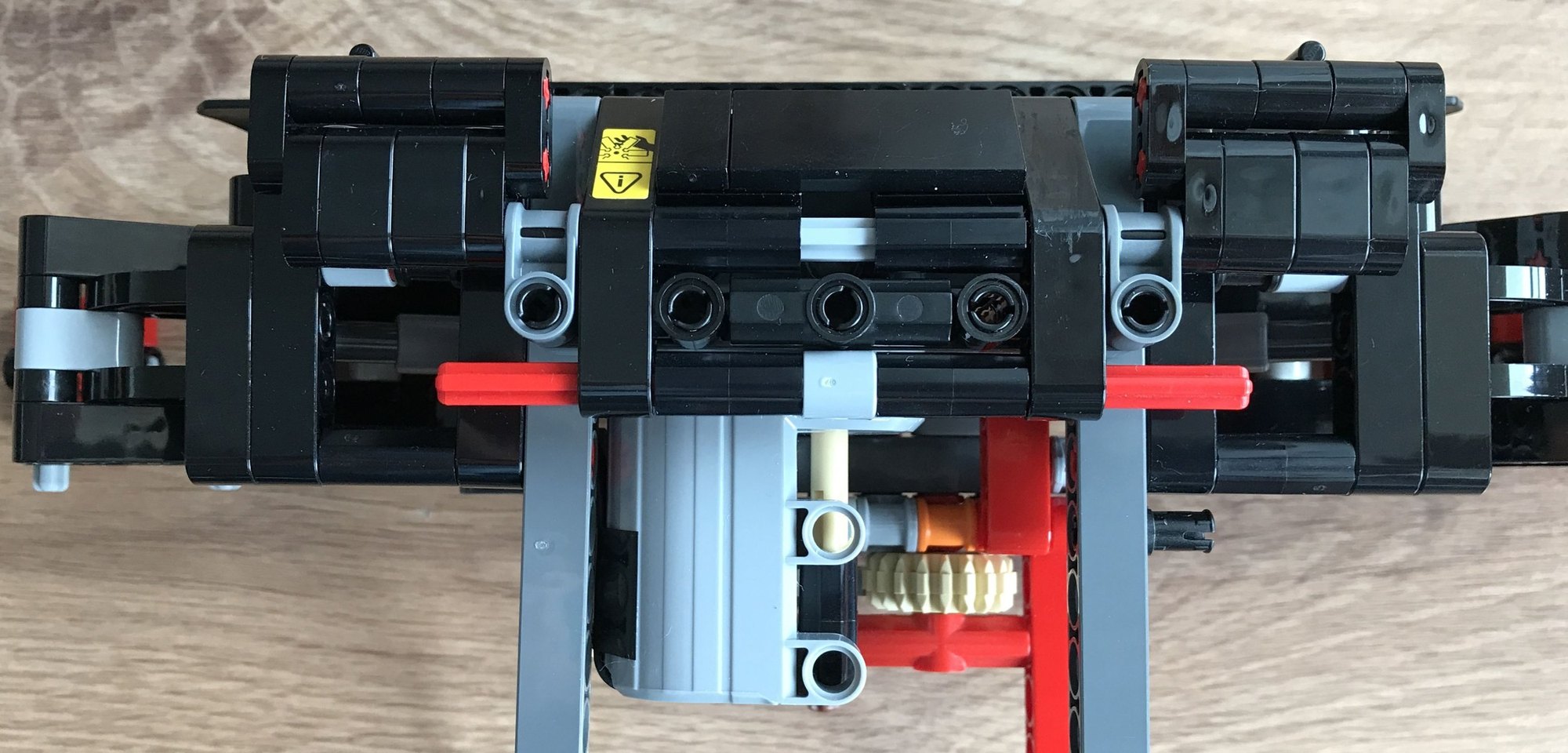
Chassis
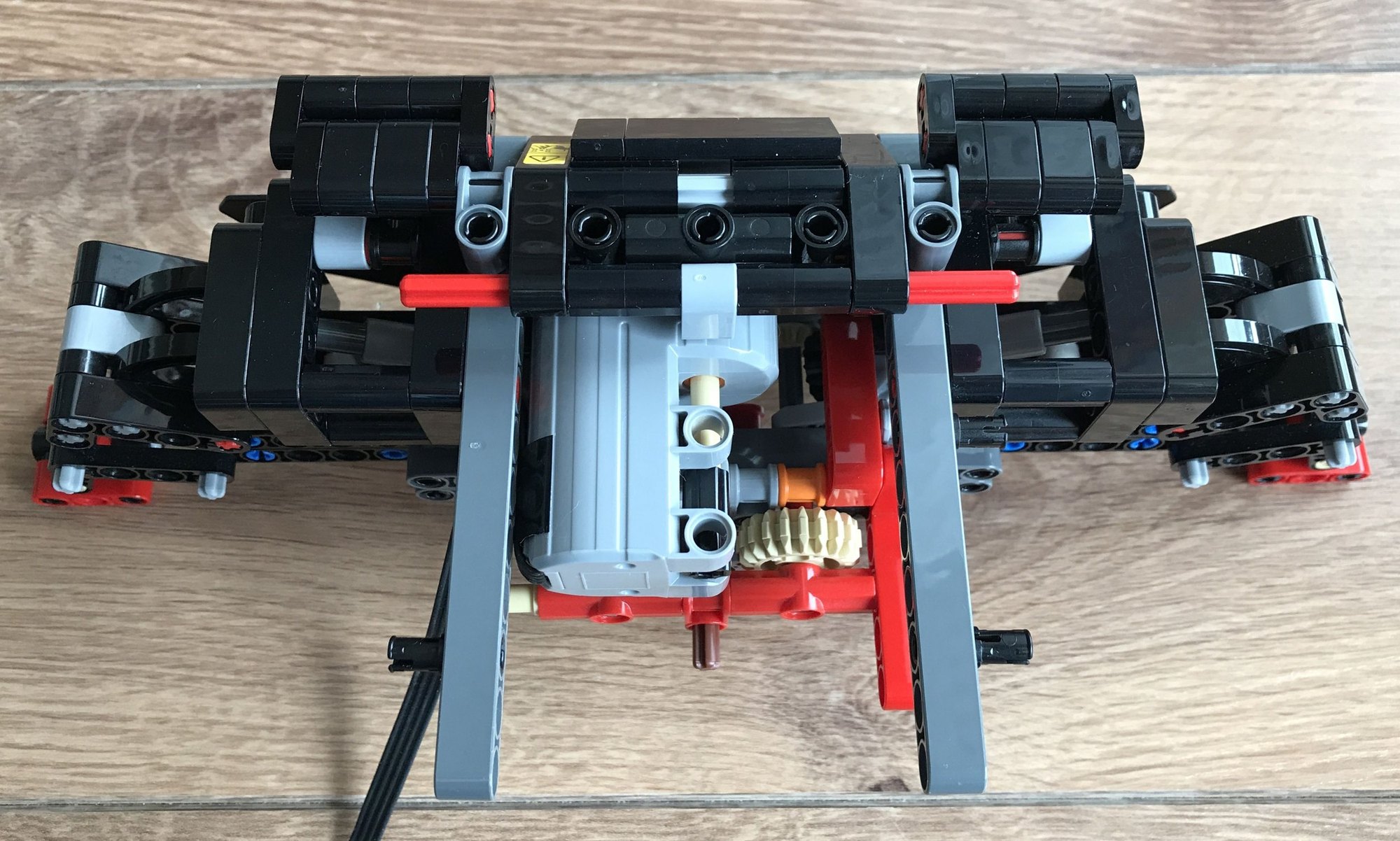
I used 2 PF L motors for propulsion and new type differentials (12:28) to get decent speed and torque. Each motor is connected directly to the corresponding axle, so there is no a gearbox or drivetrain. The final gear ratio is 6.99:1 (12:28 (new diffs) -> 8:24 (portal axles)).
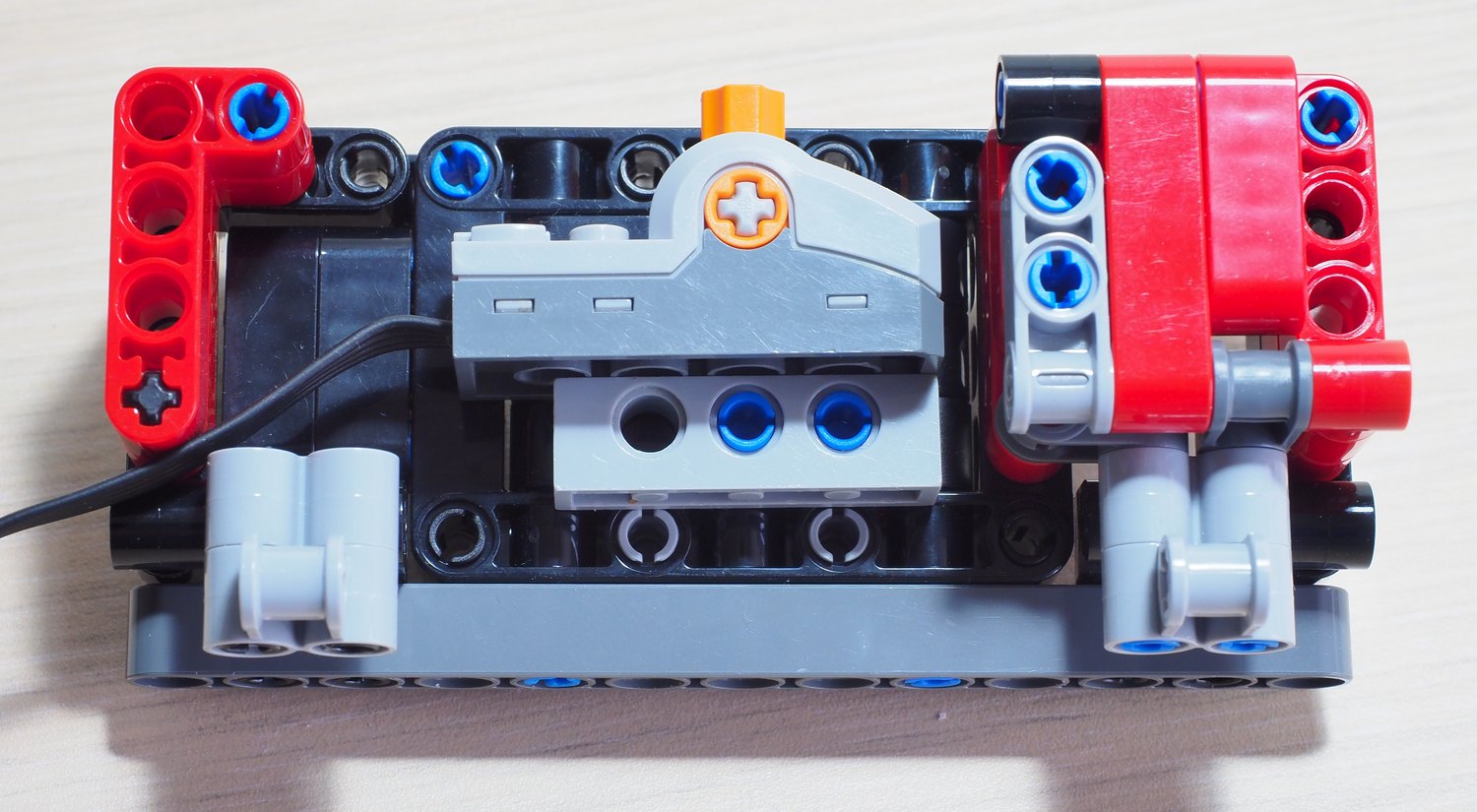
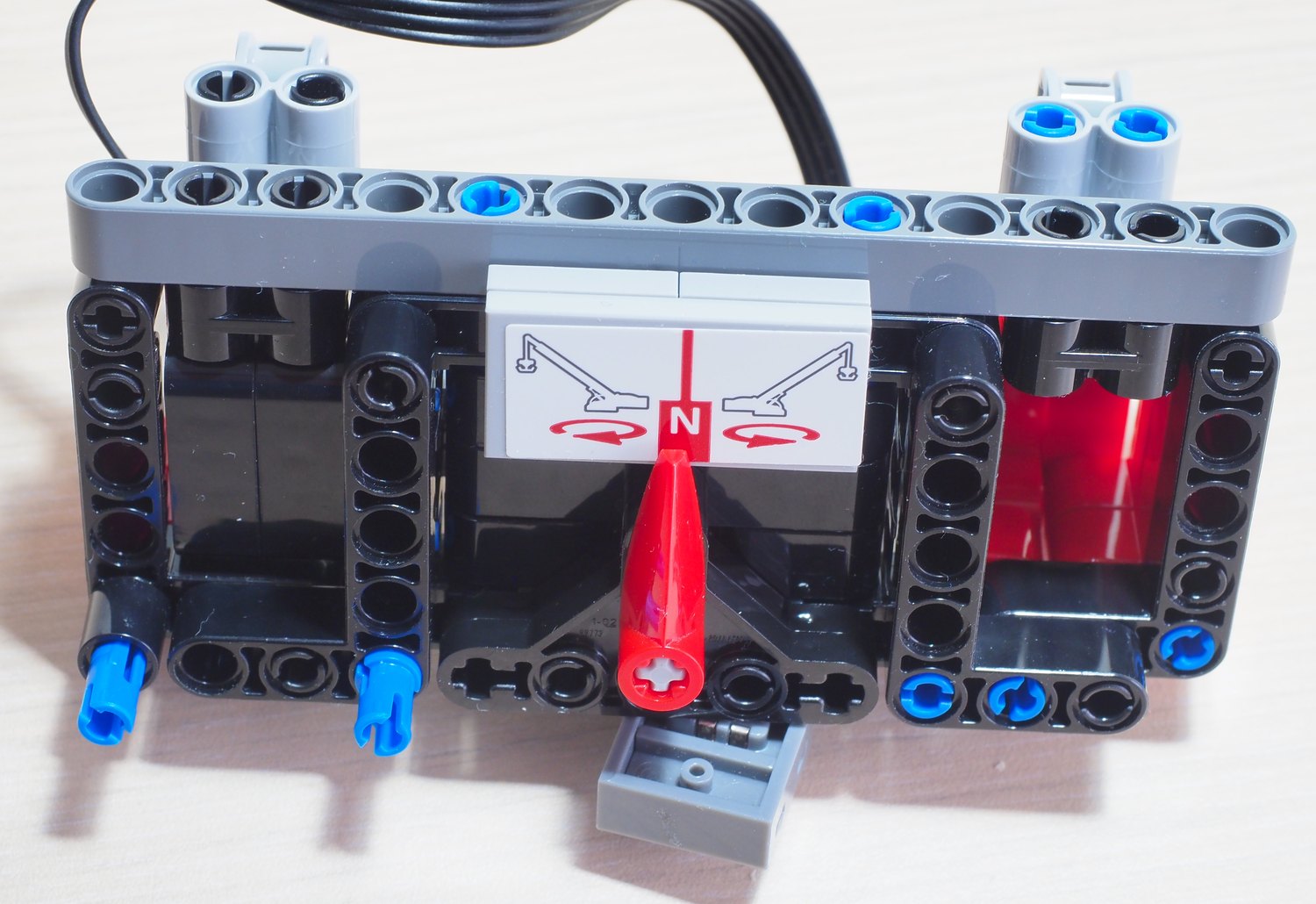
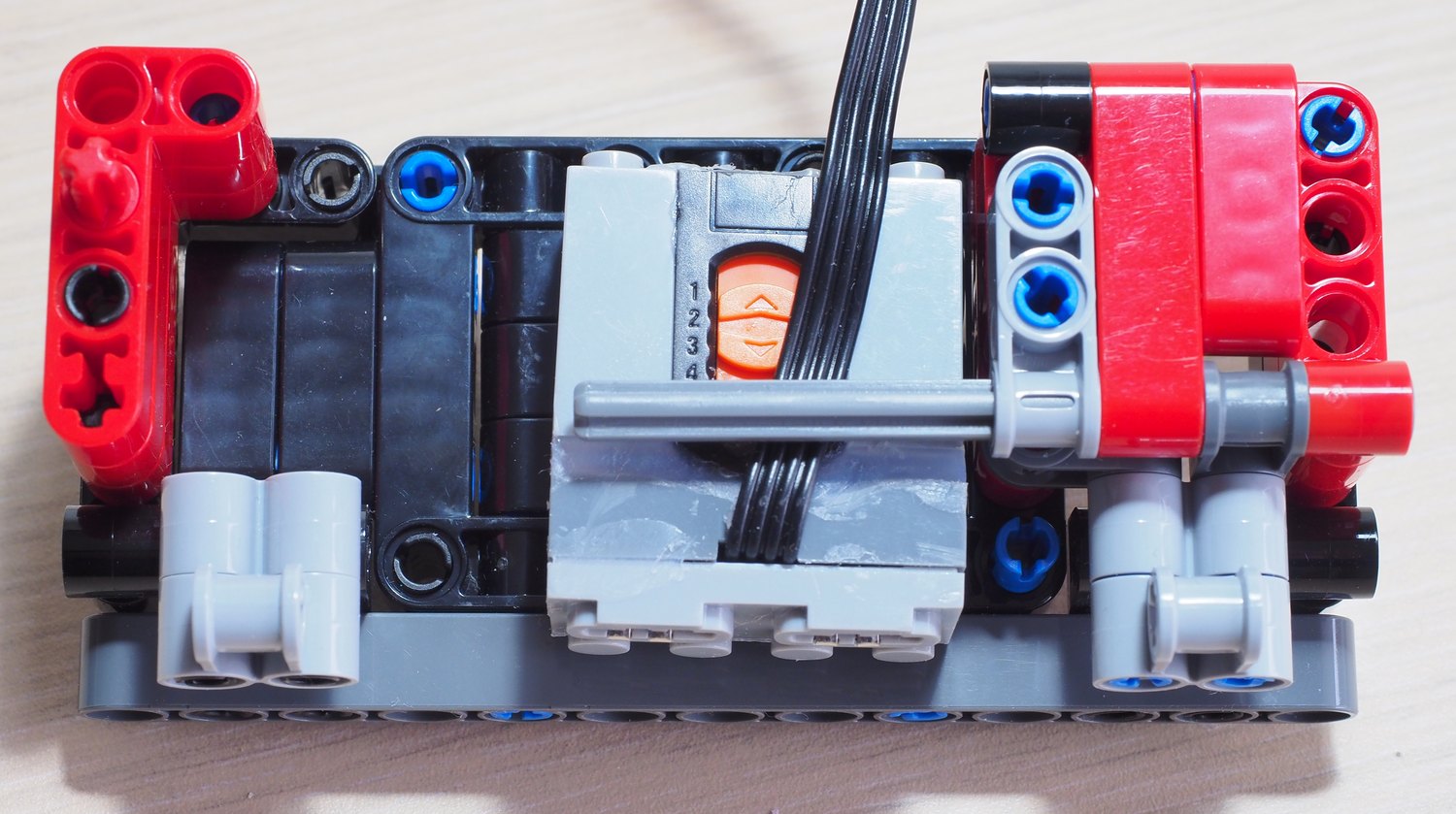
The model is steered by two servomotors located between the outriggers, each of which controls its own axis. This allows to have 3 types of steering - full, normal and crab. The steering mode is controlled manually by a PF switch. Two PF receivers are located inside the chassis (I used non-original PF receivers that operate at 2.4 GHz).
I managed to make the chassis more robust and sturdy, it doesn’t bend under load like the original set.
Specs
- Propulsion, 4x4 - 2 PF L motors
- Steering - 2 PF Servo motors
- 3 types of steering (only front axle, both axles, crab mode) - switched manually by a PF switch
- Outriggers - PF M motor
- Crane rotation - PF L motor
- Boom height - PF L motor
- Boom length - PF L motor
- Winch - PF L motor
- Metal hook
- The crane is powered by a CaDA unit
- The chassis is powered by 3 x 14500 LiPo batteries with a DC step down converter
- Turning diameter (by wheels):
- Front steering: 203cm
- Full steering: 96cm
- Crab steering: ∞
- Curb weight:
- Chassis: 2.08 kg
- Crane: 1.41 kg
- Total: 3.49 kg
Photos
Crane in section




Chassis


Outriggers

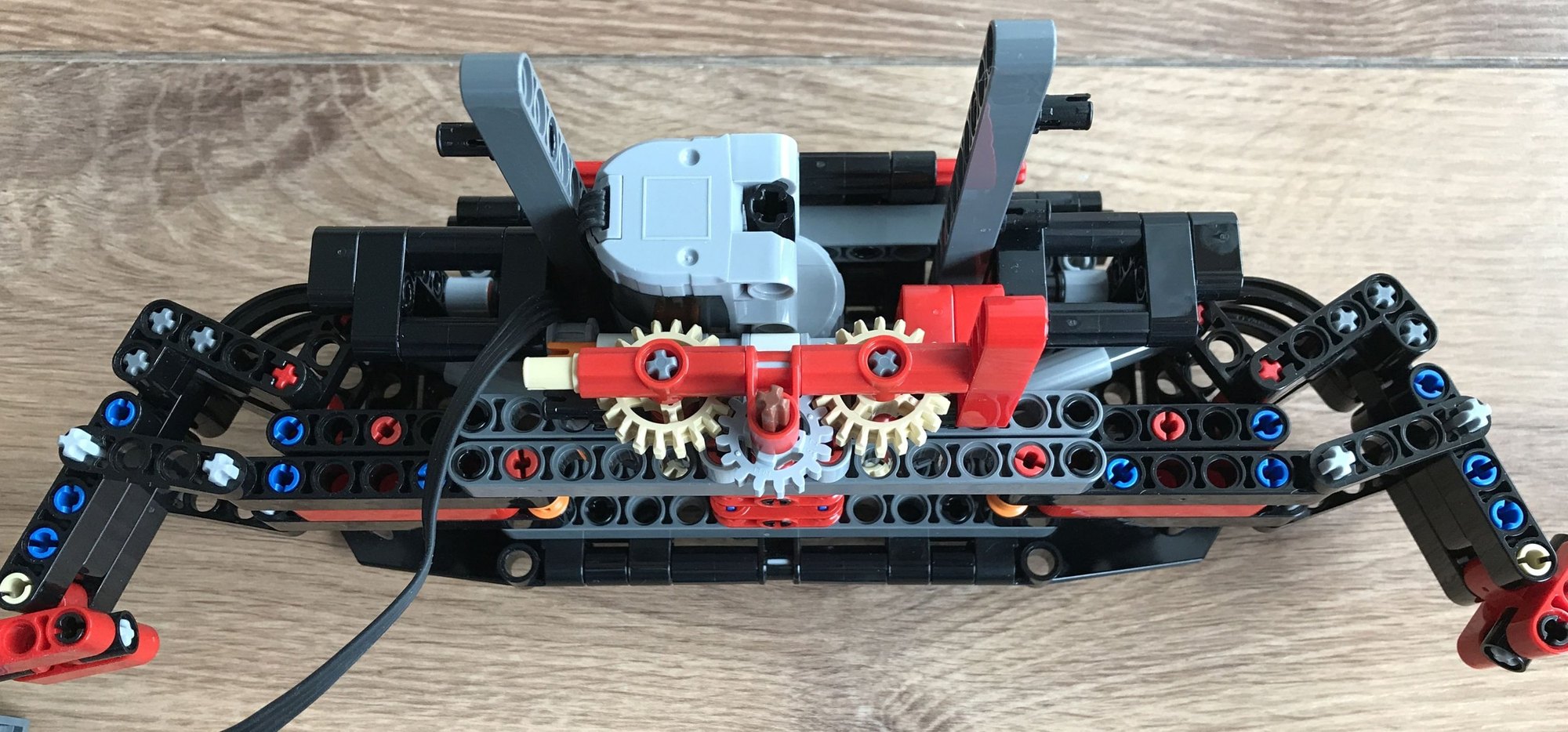
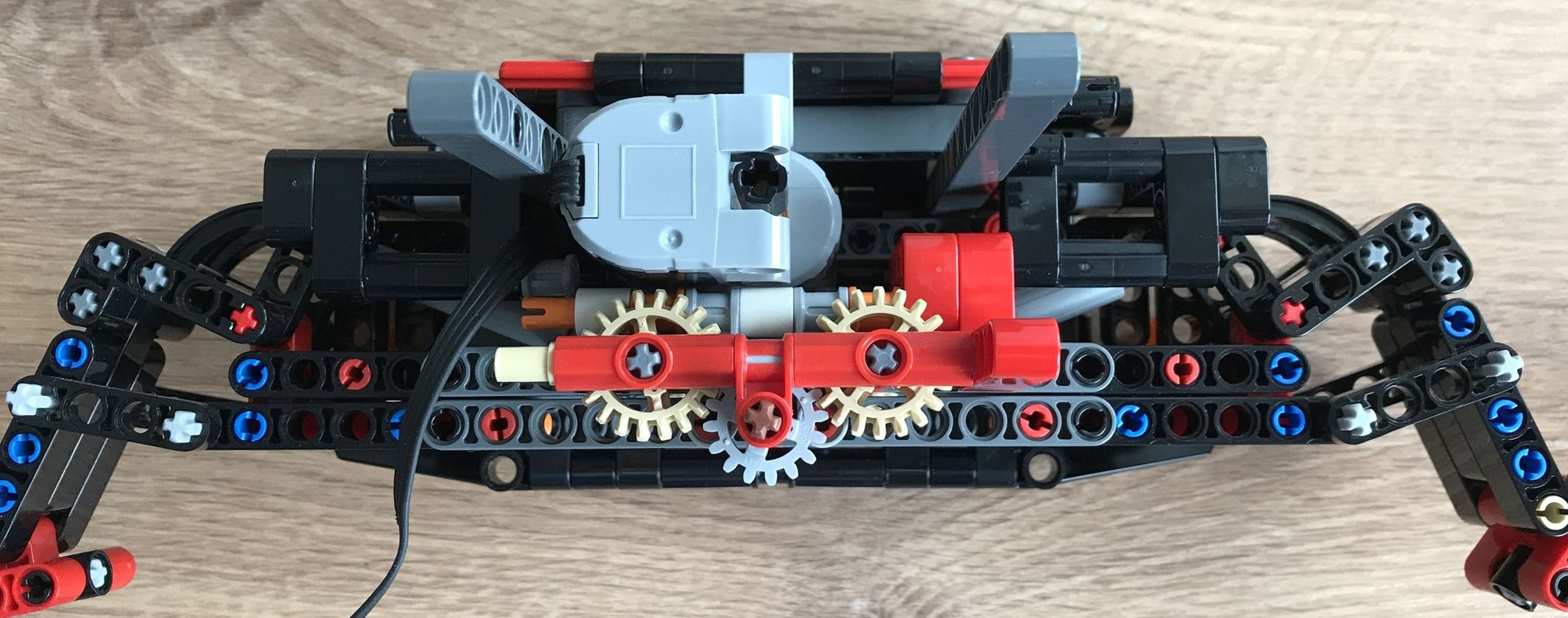
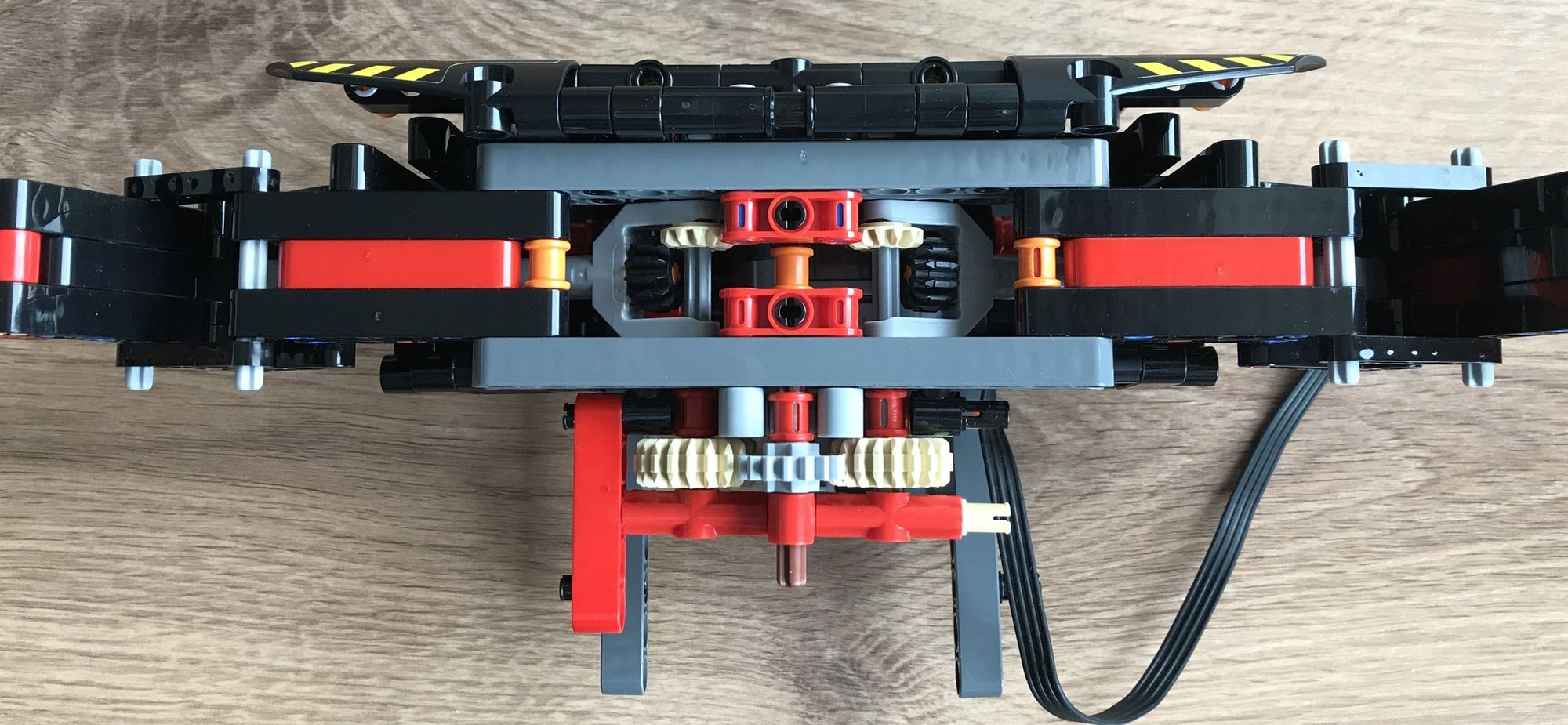
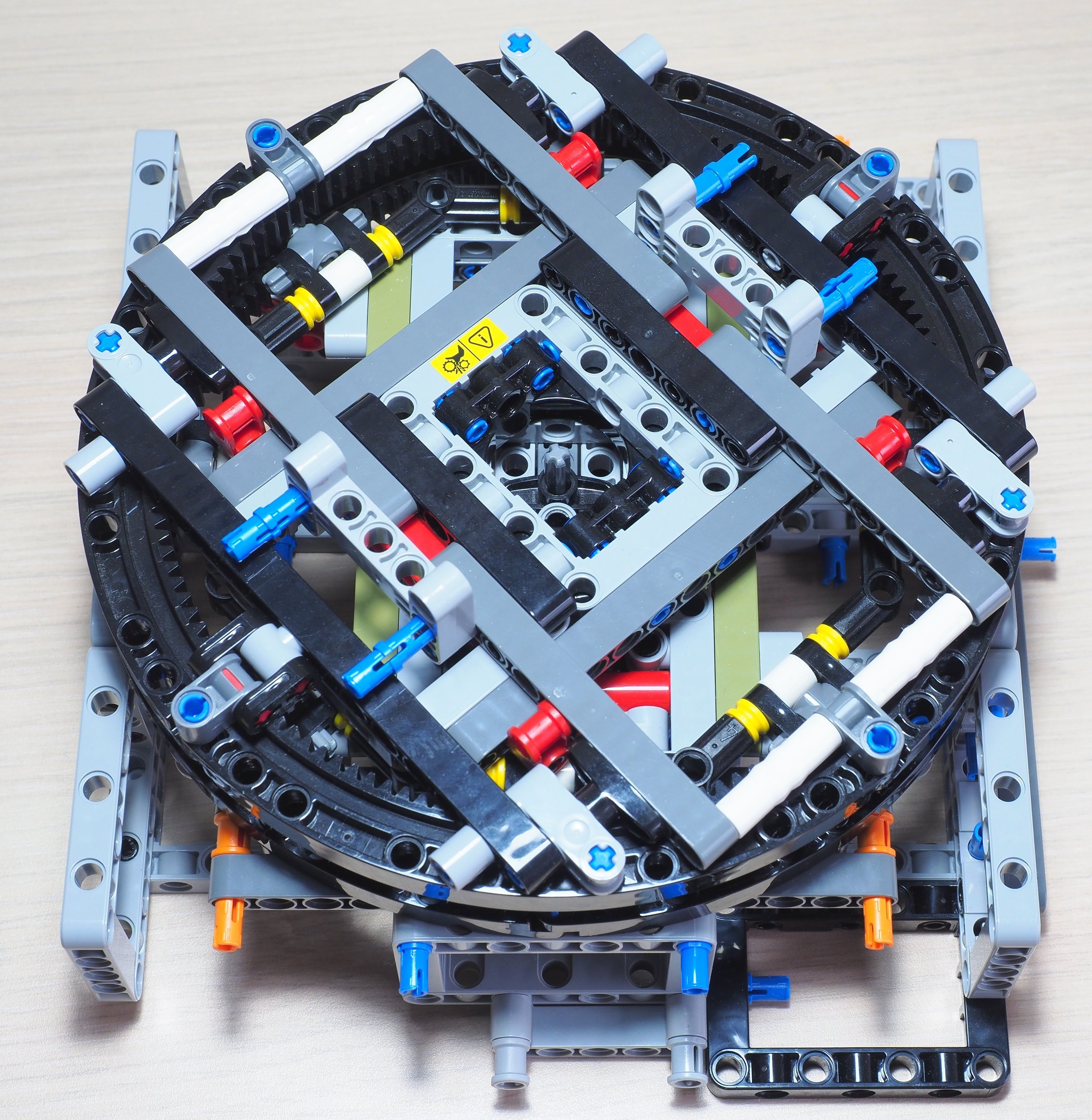
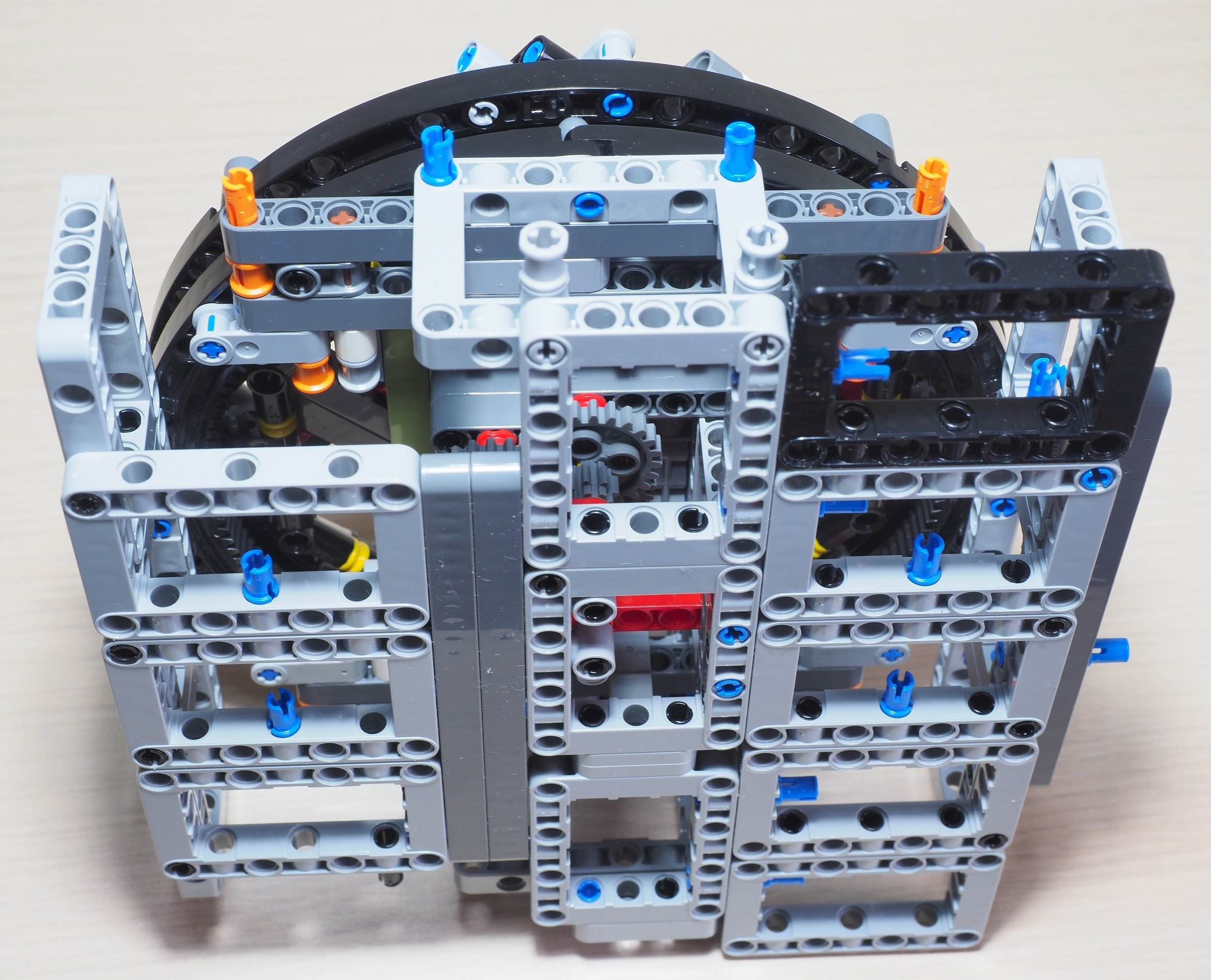
Rotation mechanism
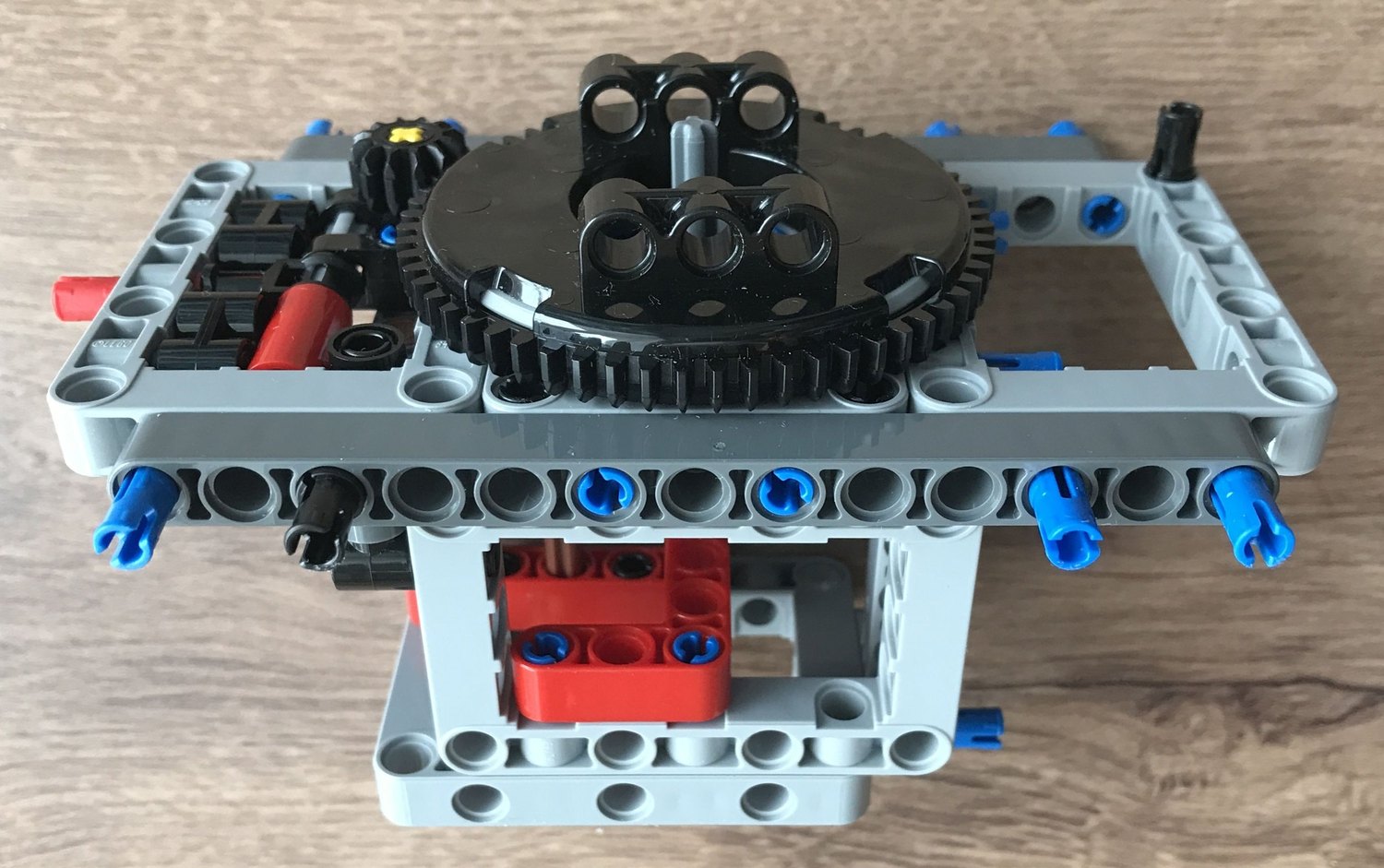
Temporary crane stand
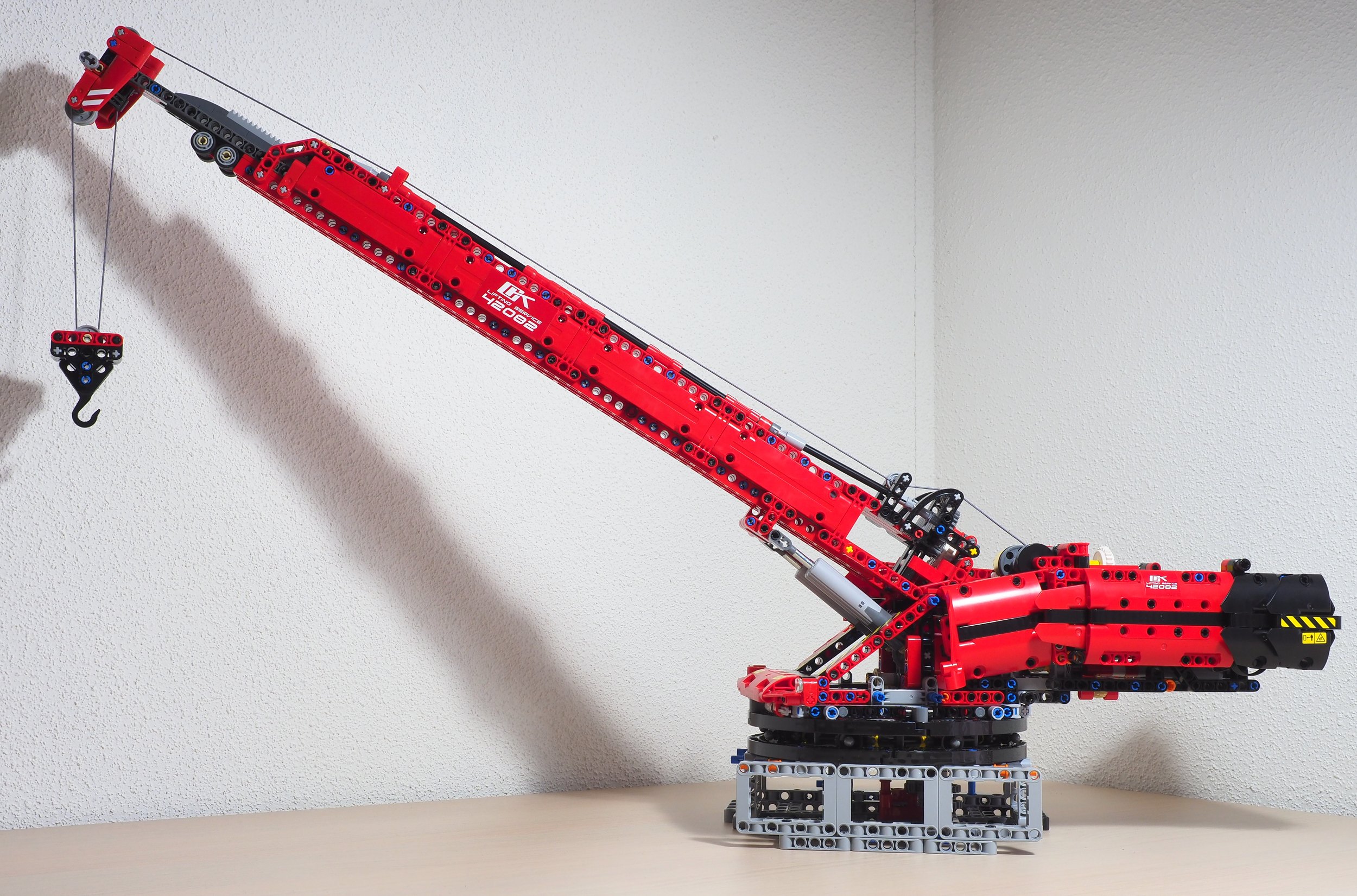
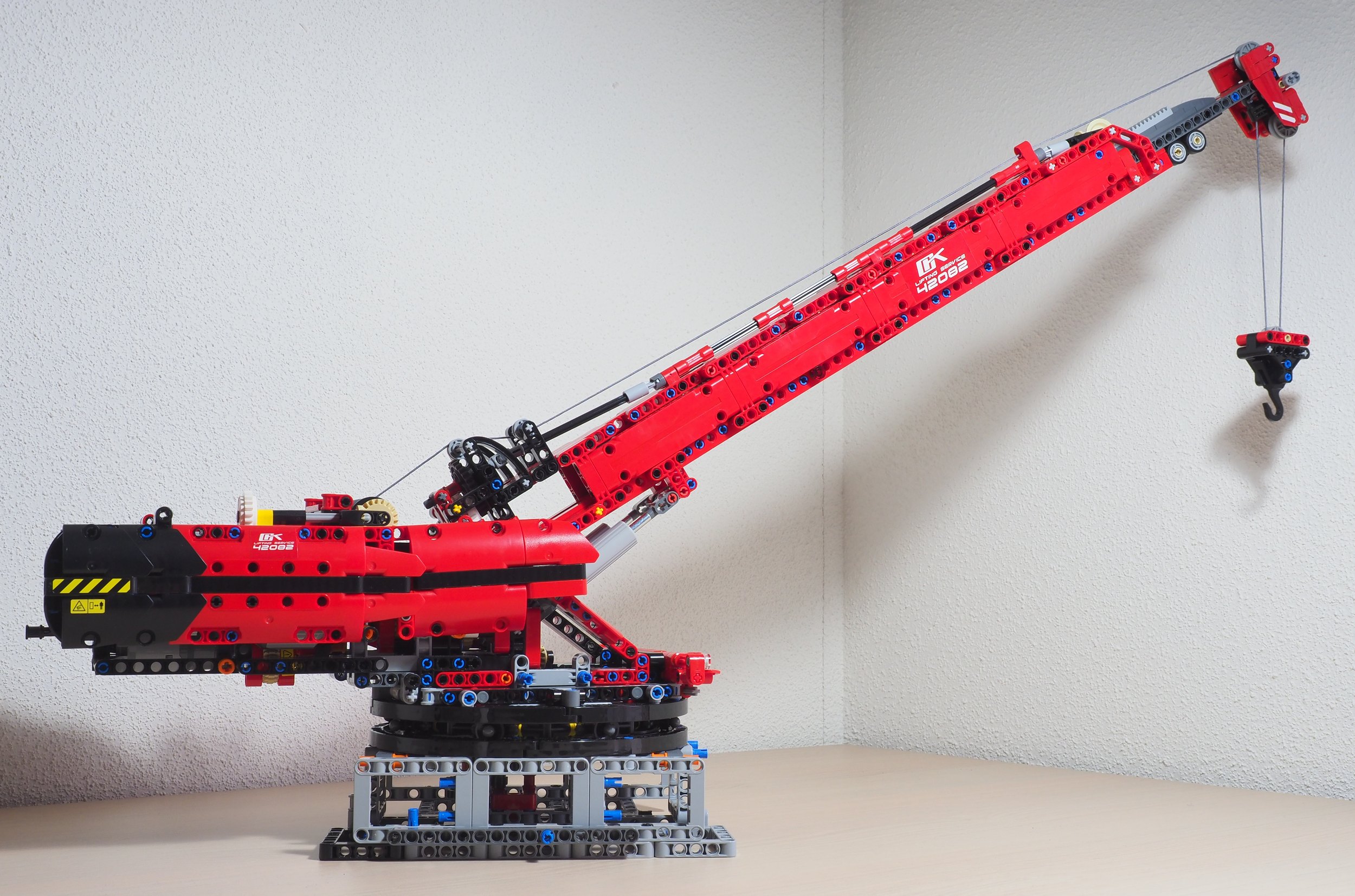
In action
