Classic Land Rover Defender, v1 (with 4L motors and RC electronics)

I didn’t originally plan to build a Land Rover Defender model. My idea was to build a chassis with a 2-speed gearbox, locking center and rear differentials, suitable for an off-road vehicle. Something similar to my Unimog, but a car, not a truck. And once the chassis is ready, I would only need to find a suitable body.
Video
Drivetrain & gearbox
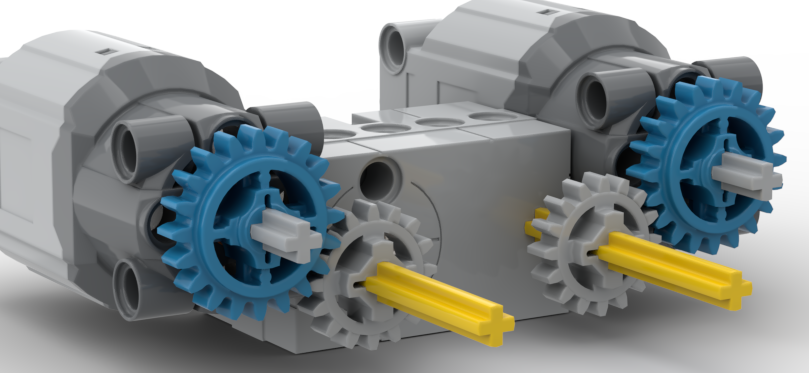
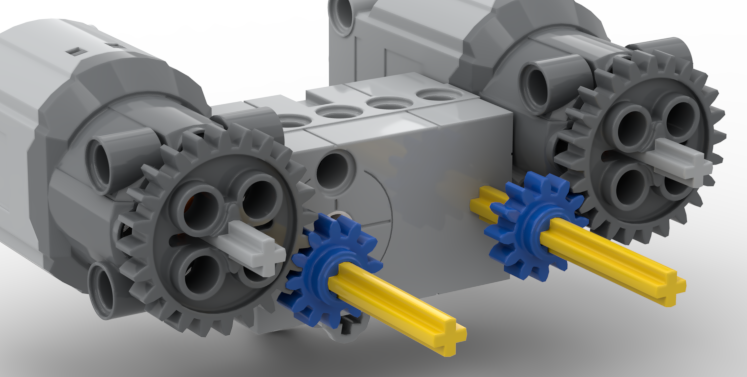
For propulsion, I used 4 L motors connected in pairs. The motors are geared up and then connected to the gearbox.
In the first (low) gear, the movement goes to the 12:20 gears and then directly to the drive shafts, the center differential is locked.
In the second (high) gear, the movement goes to the central differential through a pair of 16-tooth gears with a clutch.
The idea of the gearbox layout is taken from this MOC by Superkoala.
![]()
![]()
Motors gearing
There are two options here:
| More torque | More speed |
|---|---|
| 20:16 | 24:12 |
 |  |
Gear ratios
| Gear | Central diff | Gears | Final ratio |
|---|---|---|---|
| 1st | Locked | 20:16 (or 24:12) -> 12:20 -> 14:22 (diff in axles) -> Planetary hubs | 11.33:1 (or 7.08:1) |
| 2nd | Open | 20:16 (or 24:12) -> 16:16 -> 14:22 (diff in axles) -> Planetary hubs | 6.78:1 (or 4.25:1) |
Front & rear axles
The front axle was inspired by the Jeep Wrangler model by gyenesvi. The differential here is always open.
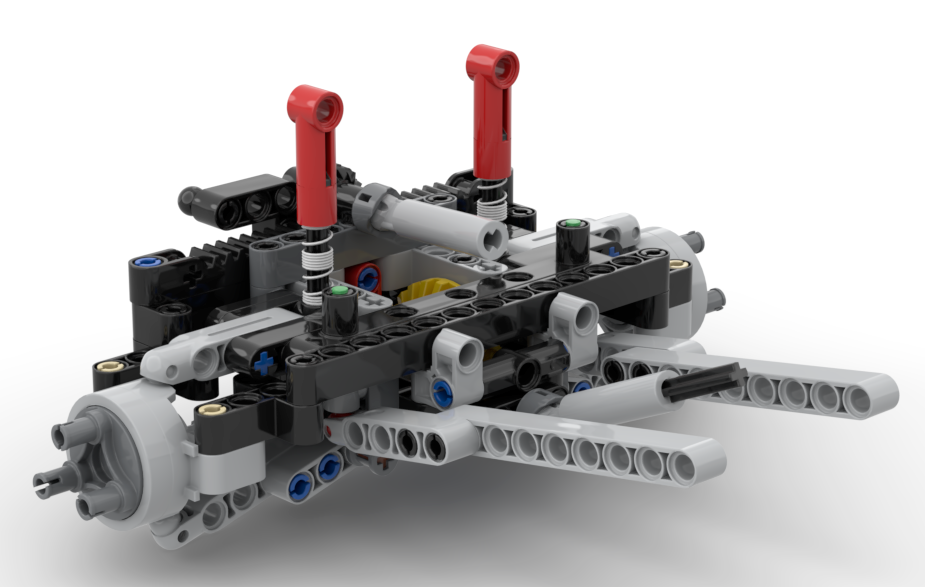
The rear axle has a locking differential, activated by a GeekServo motor.
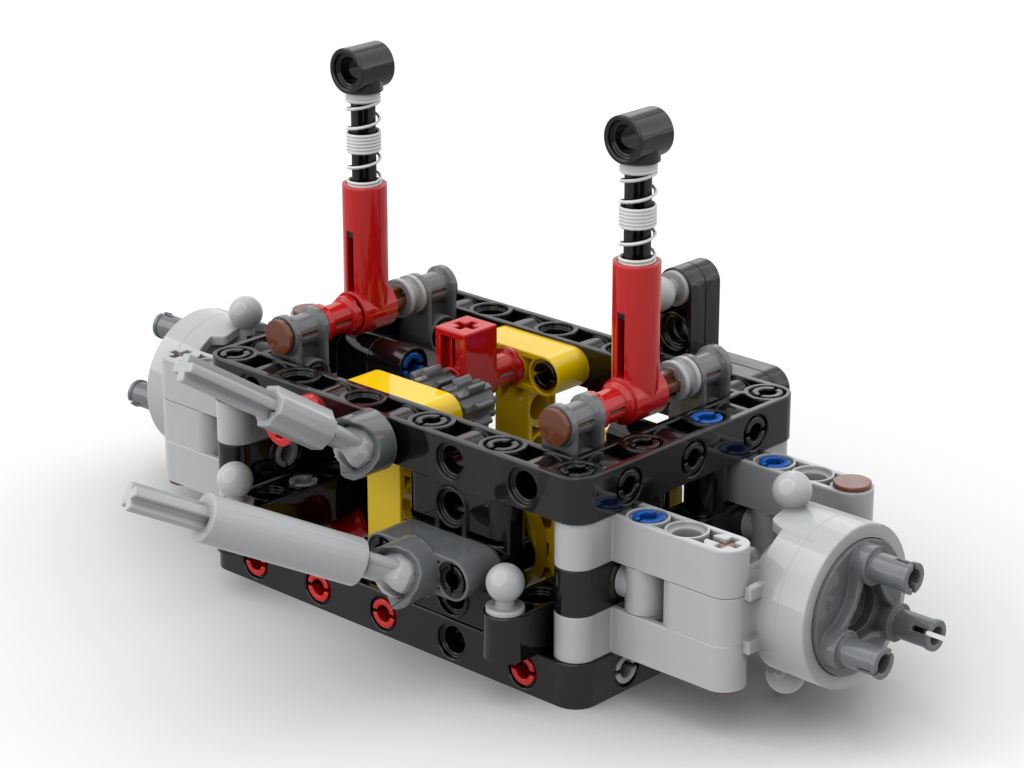
I experimented with the 9.5L shock absorbers, but they were too long for this model, so I decided to go with the standard 6.5L shocks with a hard spring. The suspension is soft, with good travel.
Bodywork
Once the chassis was ready, I started to choose the body - after several attempts I found out that the classic Land Rover Defender 110 was the best candidate!
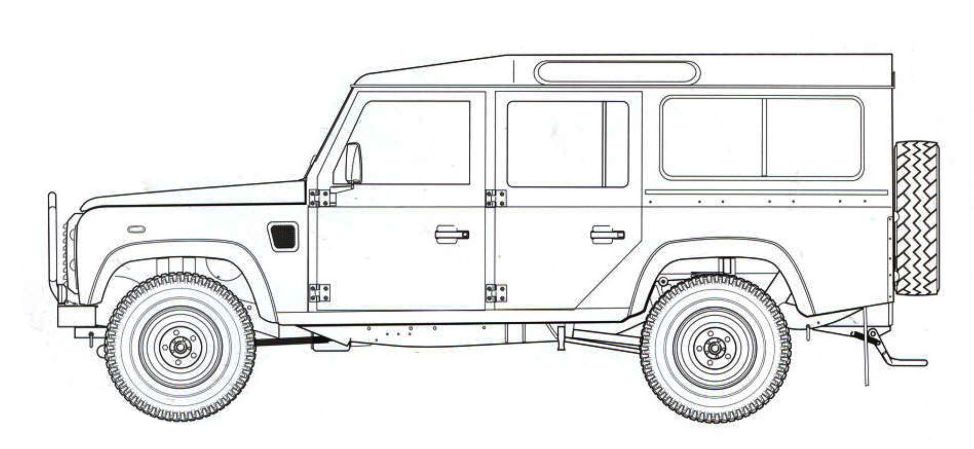
Even though the reference image I found shows a 5-door version, I decided to build a 3-door version to simplify the body and reduce the weight.
The bodywork design was heavily inspired by the Land Rover Defender 110 model by Sheepo. I decided to build it in red, luckily LEGO has enough red parts to build the body.
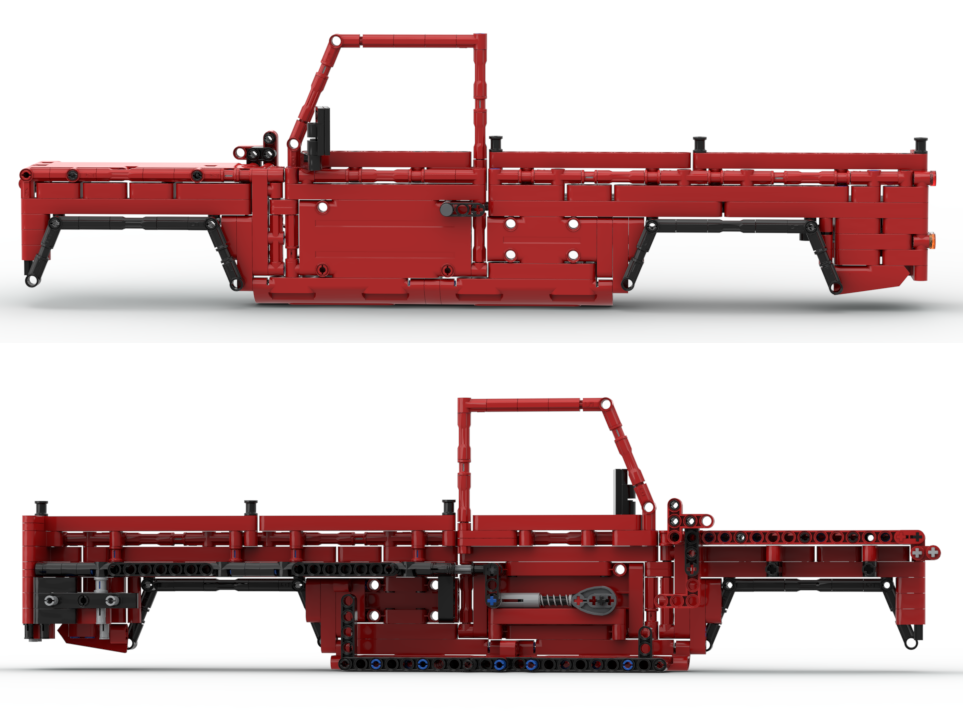
I made the body modular, so that it can be quickly disassembled into large pieces for maintenance or modifications.

The largest pieces are the left and right sides.
All 3 doors have locks.
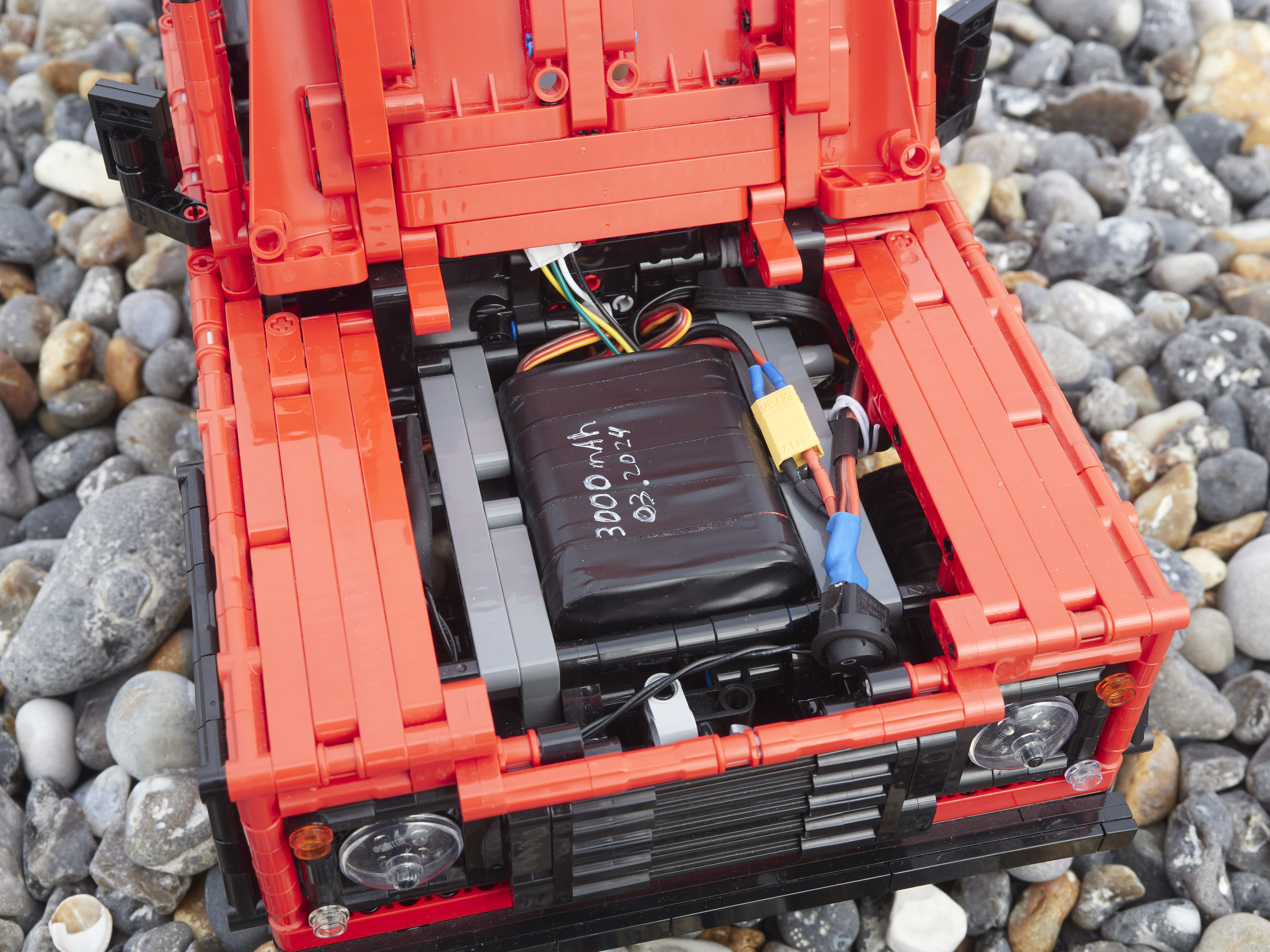
I was primarily focused on playability, so I decided to sacrifice the fake engine and place the battery under the hood for better weight distribution. The curb weight of the model is 2.40 kg.
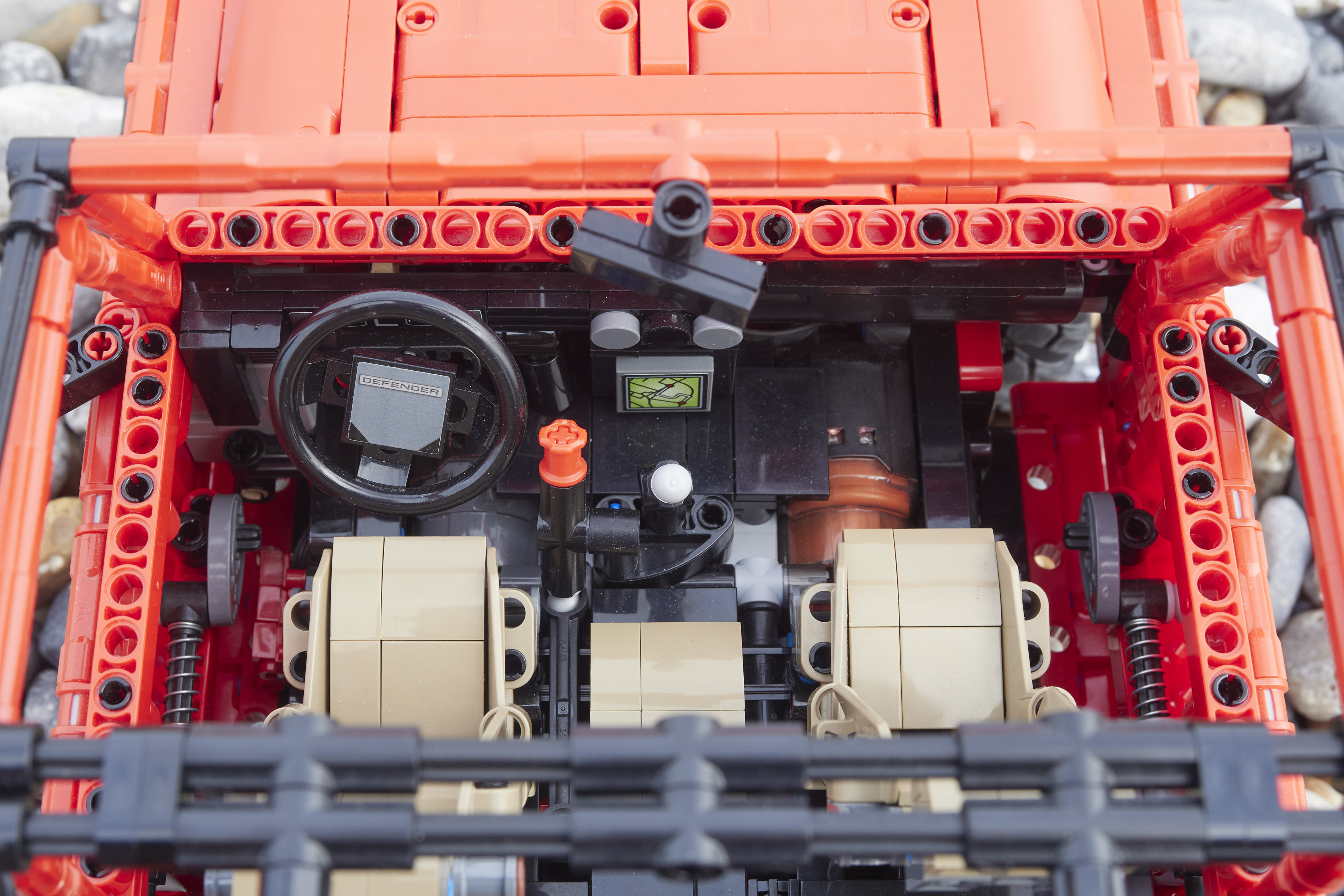
In order to have a working steering wheel, I used a second GeekServo motor. It’s connected to a separate receiver channel, which mirrors the 1st (steering) channel. The gearstick also works - it’s connected to the gearbox with a technic link. The interior is simple, the seats are taken from the 42110 LEGO set.
In the end, I am very satisfied with the model – it has a cool appearance, enough power for outdoor play, and a reliable transmission!
Electronics
Specs
- Driving: 4 PF-compatible L motors (non-original with higher RPM)
- Steering: GeekServo motor + separate GeekServo motor for the steering wheel
- Planetary wheel hubs
- Lockable differential in the rear axle
- Full-time AWD with lockable center differential in low gear
- Turning diameter (by wheels): 216cm
- No fake engine
- Openable doors with locks
- Custom LED lights
- Powered by 3s LiPO
- Curb weight: 2.40 kg
Photos





Radio configuration
End points:
- 1ch (steering): 97%
- 3ch (gearbox): 38%
- 4ch (rear diff lock): 0% forward, 50% backward